

Flexible guide rail welding robot
A welding robot, flexible guide rail technology, applied in welding equipment, auxiliary welding equipment, welding/cutting auxiliary equipment, etc., can solve the problems of unstable welding accuracy, high risk factor, large workload, etc. The welding position is accurate and the effect of improving the welding accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
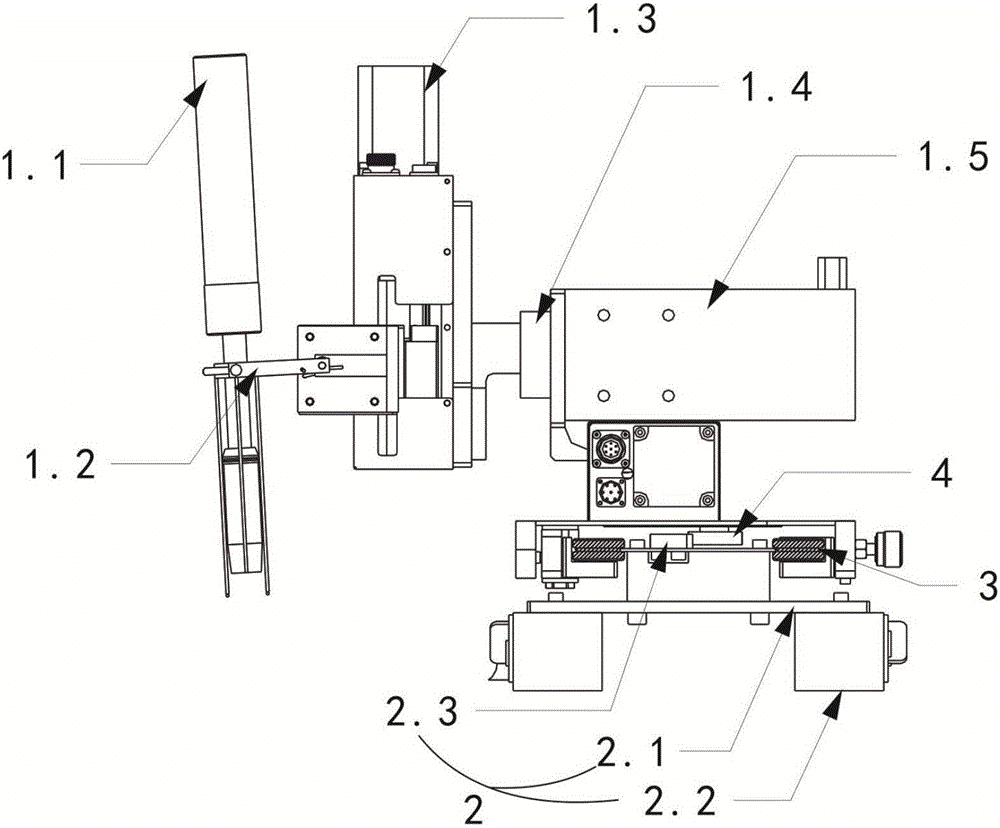
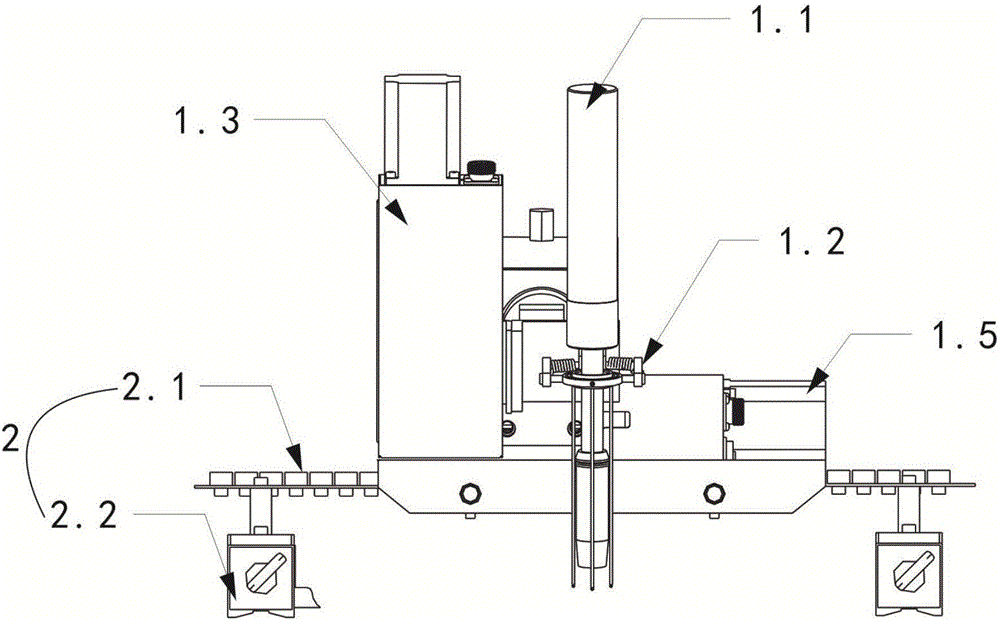
[0032] Embodiment 1, a welding robot with flexible guide rails, including a welding main body (1) for controlling welding actions and a track device (2) for absorbing on the surface of a welding workpiece, the welding main body (1) is placed on the track device (2) ); the track device (2) includes a flexible guide rail (2.1) and magnetic seats (2.2) evenly distributed on the bottom of the flexible guide rail (2.1), and the magnetic seats (2.2) are adsorbed on the surface of the welding workpiece.
[0033] The flexible guide rail welding robot of this embodiment also includes a main drive wheel (3) for driving the movement of the welding main body (1) and a guide wheel (4) for turning, and the main drive wheel (3) is elastically connected The piece (8) is connected with the flexible guide rail (2.1), and the guide roller (4) is meshed with the flexible guide rail (2.1) through the gear (2.3). Further, the flexible guide rail welding robot also includes a DC deceleration motor a...
Embodiment 2
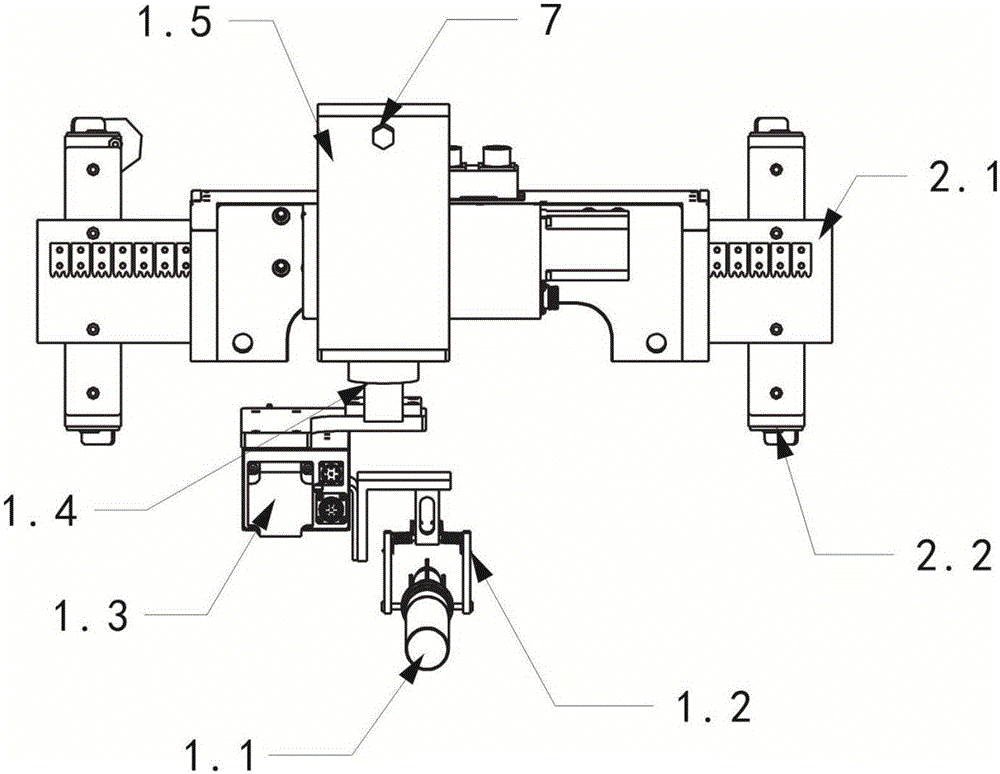
[0035] Embodiment 2 is optimized as follows on the basis of Embodiment 1: the welding main body (1) includes a welding torch (1.1), a welding torch clamp (1.2), a height adjustment mechanism (1.3), an angle adjustment mechanism (1.4) and a lateral adjustment mechanism ( 1.5); the welding torch (1.1) is fixed on the welding torch clamp (1.2), and one end of the welding torch clamp (1.2) is connected to the height adjustment mechanism (1.3) that controls the welding height position, and one end of the height adjustment mechanism (1.3) is connected to An angle adjustment mechanism (1.4) for controlling the welding angle is connected, and the angle adjustment mechanism (1.4) is connected with a horizontal adjustment mechanism (1.5) for controlling the left and right movement of the welding torch (1.1).
[0036]In this embodiment of the flexible guide rail welding robot, the horizontal adjustment mechanism (1.5) and the height adjustment mechanism (1.3) both include a swing motor, a...
Embodiment 3
[0038] Embodiment 3 On the basis of Embodiment 1 or 2, the following optimizations are made: the flexible rail welding robot of this embodiment also includes a remote control device and a sensor (7) arranged on the robot main body (1), and the remote control device passes through The sensor (7) realizes information interaction with the robot main body (1). The operator controls the welding operation of the robot in real time through the remote control device to realize human-computer interaction.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More