

Reconfigurable man-machine cooperation mechanical arm system based on WIFI
A technology of human-machine collaboration and robotic arm, which is applied in the field of robotics, can solve problems such as single function and inability to replace modules and modules, and achieve the effects of rich functions, fast reconfiguration, and high security level
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0023] It should be noted that, in the case of no conflict, the embodiments in the present application and the features in the embodiments can be combined with each other.
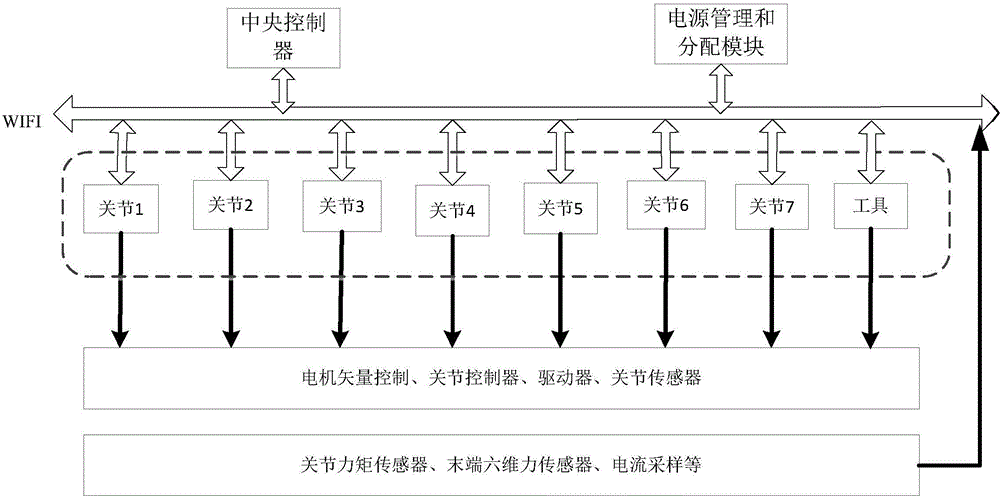
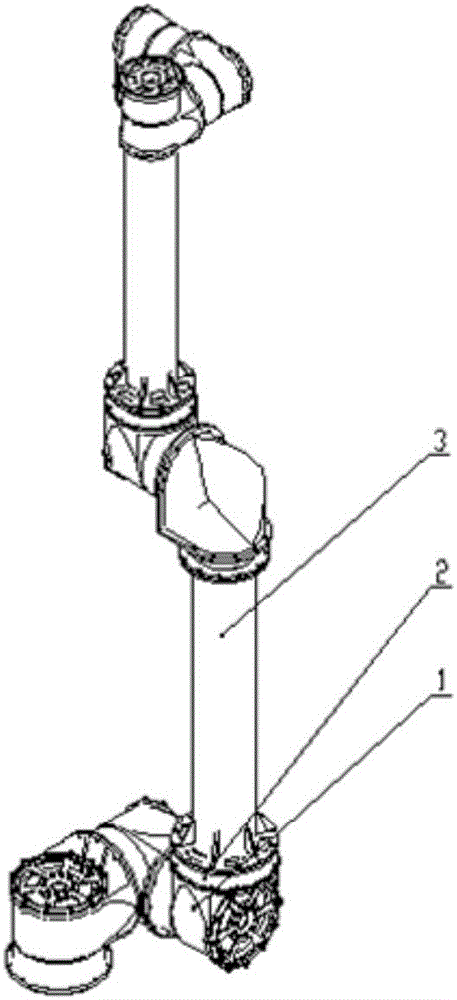
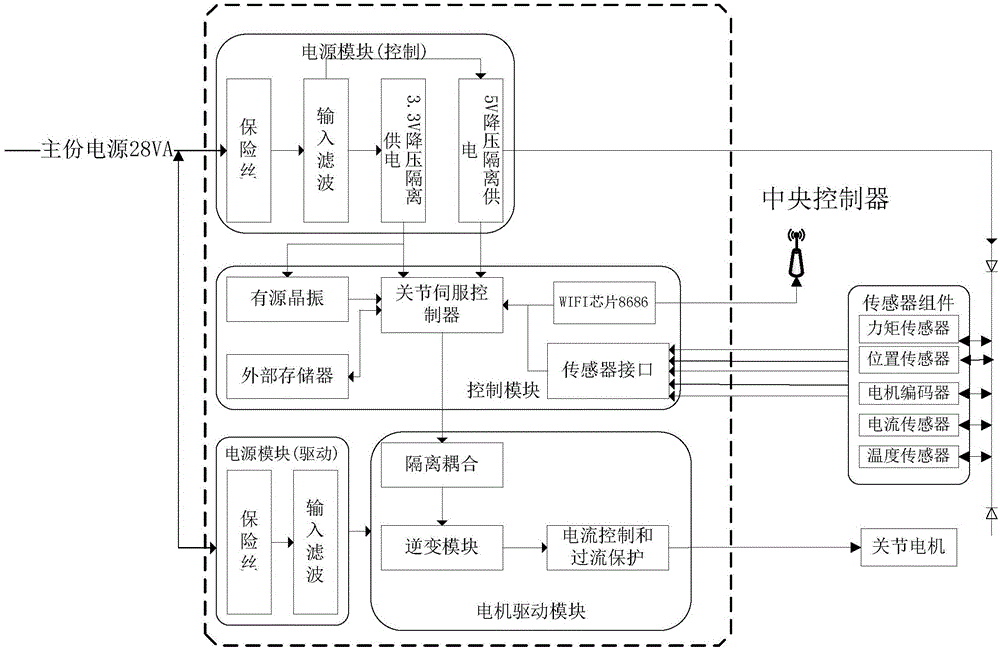
[0024] The present invention provides a WIFI-based reconfigurable human-machine cooperative manipulator system, including a joint, a reconfigurable interface, and an arm rod, and the joint and the reconfigurable interface are fixedly connected through the joint at the active end of the reconfigurable interface , the boom and the reconfigurable interface are fixedly connected through the spigot at the passive end of the reconfigurable interface; the system also includes an intelligent terminal, a WIFI communication module, a joint servo controller, a sensor signal acquisition module, a motor drive module and The joint motor, the intelligent terminal is connected to the joint servo controller through the WIFI communication module; the output end of the joint servo controller is connected to the motor drive mo...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More