

System and method for analyzing and controlling coupled dynamic characteristics of robot
A dynamic characteristic and robotic technology, applied in the field of robotics, can solve problems such as error-prone, error, and error
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
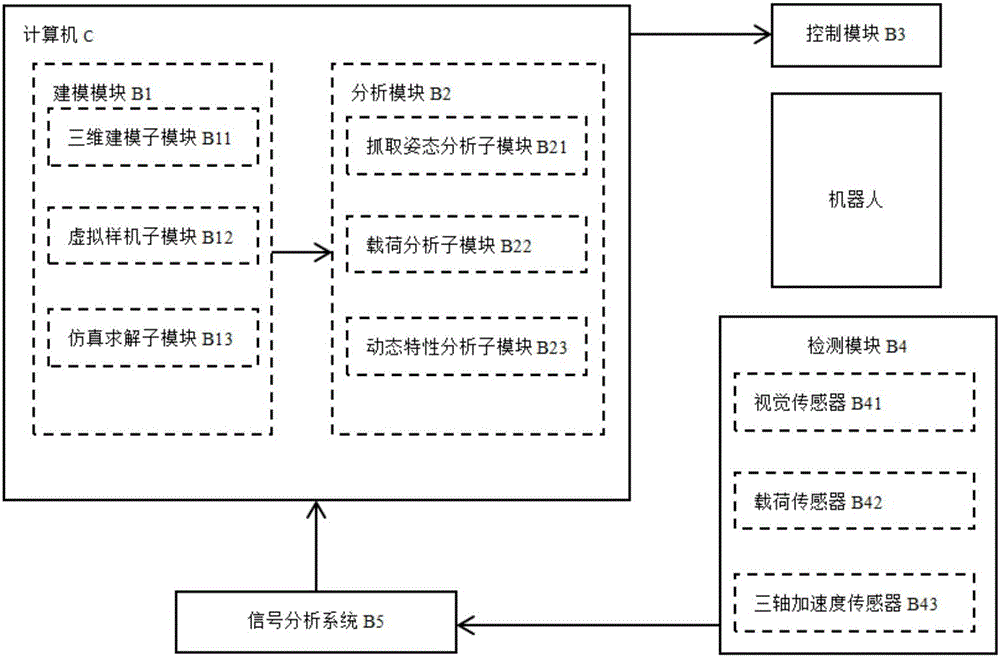
[0118] like Figure 4 As shown, the embodiment of the present invention takes a four-degree-of-freedom articulated robot as an example to describe the system and method for analysis and control of robot coupling dynamic characteristics of the present invention.
[0119] In this embodiment, the drive system of the selected four-degree-of-freedom articulated robot is driven by the motor 1, and the electromagnetic parameters of the drive system interact with the mechanical parameters to form the electromechanical coupling of the system. Transmission system 2 adopts gears or other transmission joints, and rigid-flexible coupling exists in the transmission process. The end articulated arm 3-1 of the actuator 3 is fixed with the end effector 4, and the end effector 4 is used to grab the load 8, and the end articulated arm 3-1 generates elasticity during the operation or during the motion conversion process and sudden stop Vibration affects the operation accuracy and stability of th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More