

Binocular vision-based method and apparatus for detecting barrier in indoor shadow environment
An obstacle detection and binocular vision technology, applied in the field of computer vision, can solve problems such as large amount of calculation, large error and redundant information, and inability to accurately extract obstacles, and achieve accurate, fast and accurate parallax calculation methods. Accurately obtained effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0024] The present invention is based on a binocular vision-based obstacle detection method in an indoor shadow environment. A binocular vision system is used to detect ground obstacles in an indoor shadow environment. The specific implementation steps are as follows:
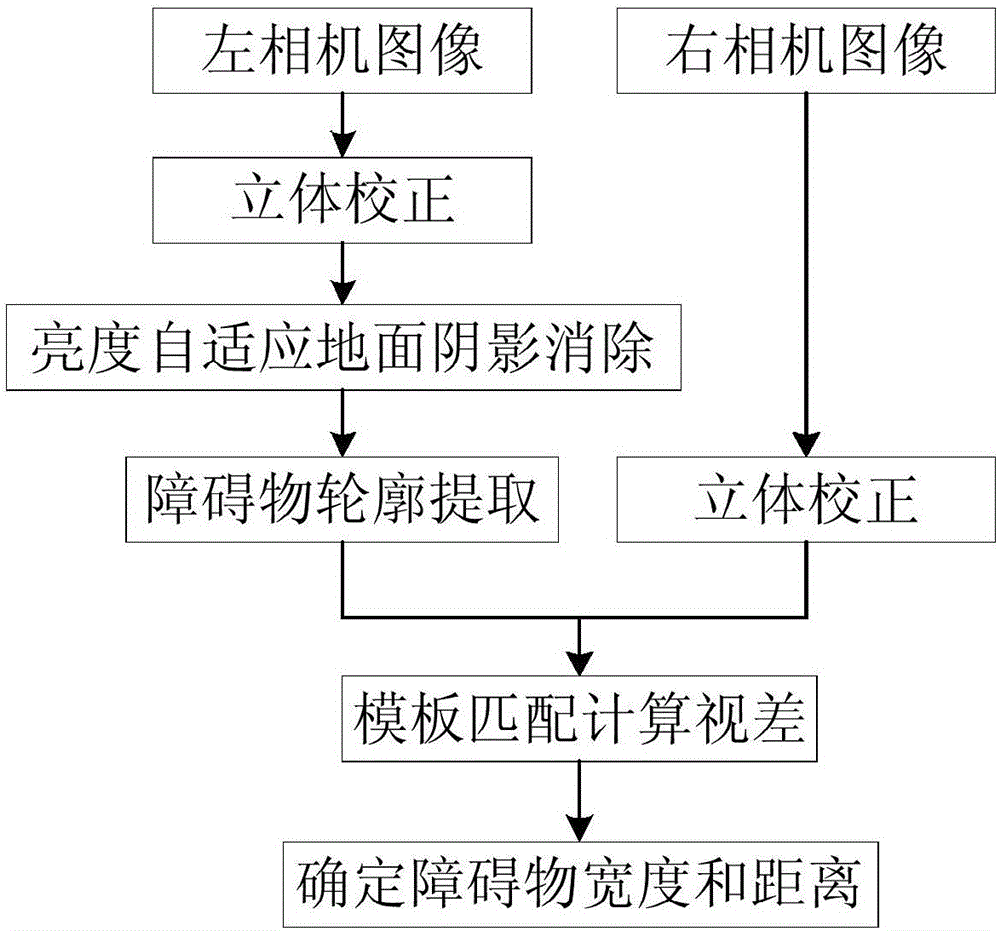
[0025] Such as figure 1 As shown, a method for detecting obstacles in an indoor shadow environment based on binocular vision, using a binocular vision system, includes steps:
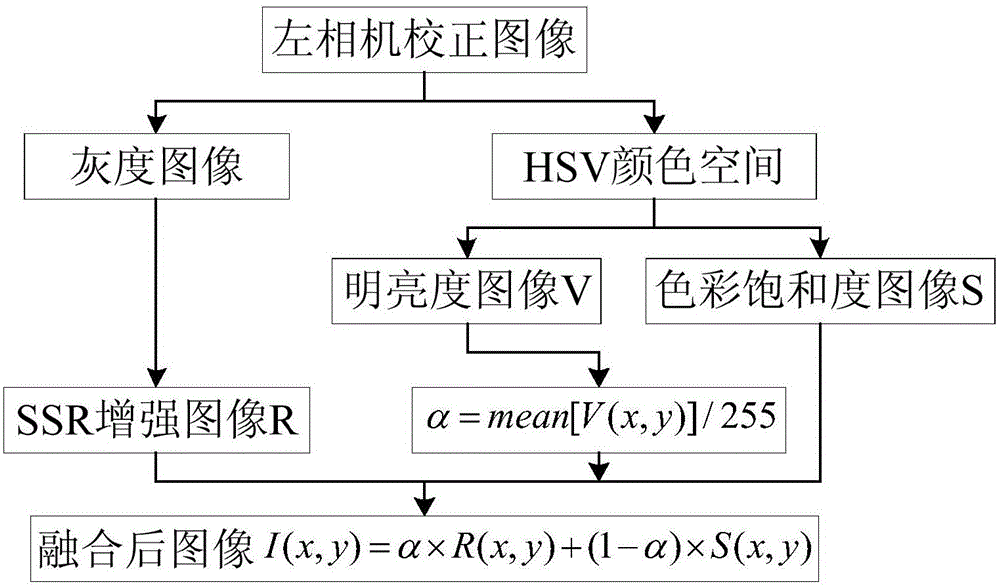
[0026] (1) Eliminate shadows through the single-scale Retinex algorithm, extract the color saturation of the original image, and fuse it with the image information that eliminates shadows. Adaptively adjust and enhance the gray level difference between the ground and obstacles through the ambient brightness information to distinguish obstacles come out;
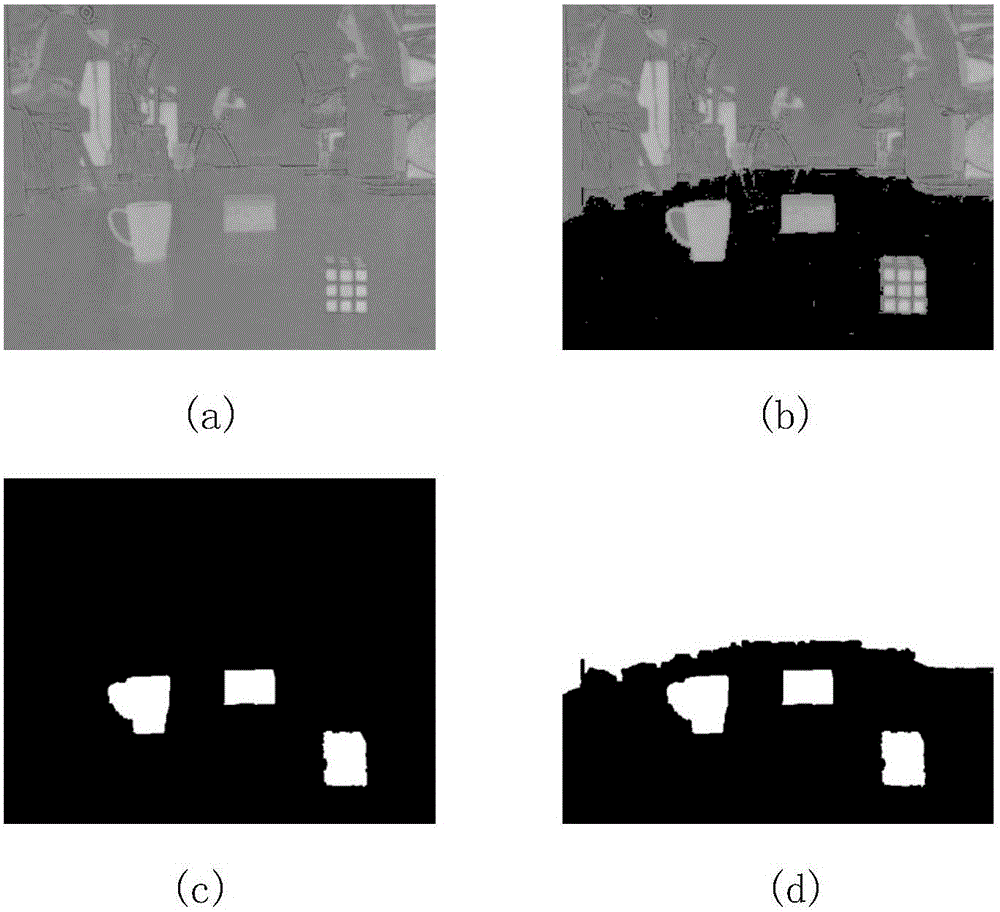
[0027] (2) Use the seed filling algorithm to fill the ground area of the fused image, and then obtain the obstacle area through threshold segmentation, erosion, and expansion operati...
Embodiment 2
[0046] A binocular vision-based obstacle detection device in an indoor shadow environment, using a binocular vision system, including:
[0047] The shadow elimination module is used to eliminate shadows through the single-scale Retinex algorithm, extract the color saturation of the original image, and fuse it with the image information for shadow elimination. Adaptively adjust and enhance the gray level difference between the ground and obstacles through the ambient brightness information, and Obstacles are distinguished;
[0048] The obstacle detection module is used to use the seed filling algorithm to fill the ground area of the fused image, and then obtain the obstacle area through threshold segmentation, erosion, and expansion operations, and obtain its circumscribed rectangle;
[0049] The obstacle measurement module is used to use the binocular vision system to use the obtained obstacle area as a template to match and calculate the parallax of the center point in the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More