

Four-shaft stacking robot
A palletizing robot and the fourth technology, applied in the field of four-axis palletizing robots, can solve the problems of limited grasping area, large volume, and cumbersome balance device, and achieve simple overall structure, high transmission precision, and large grasping area. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
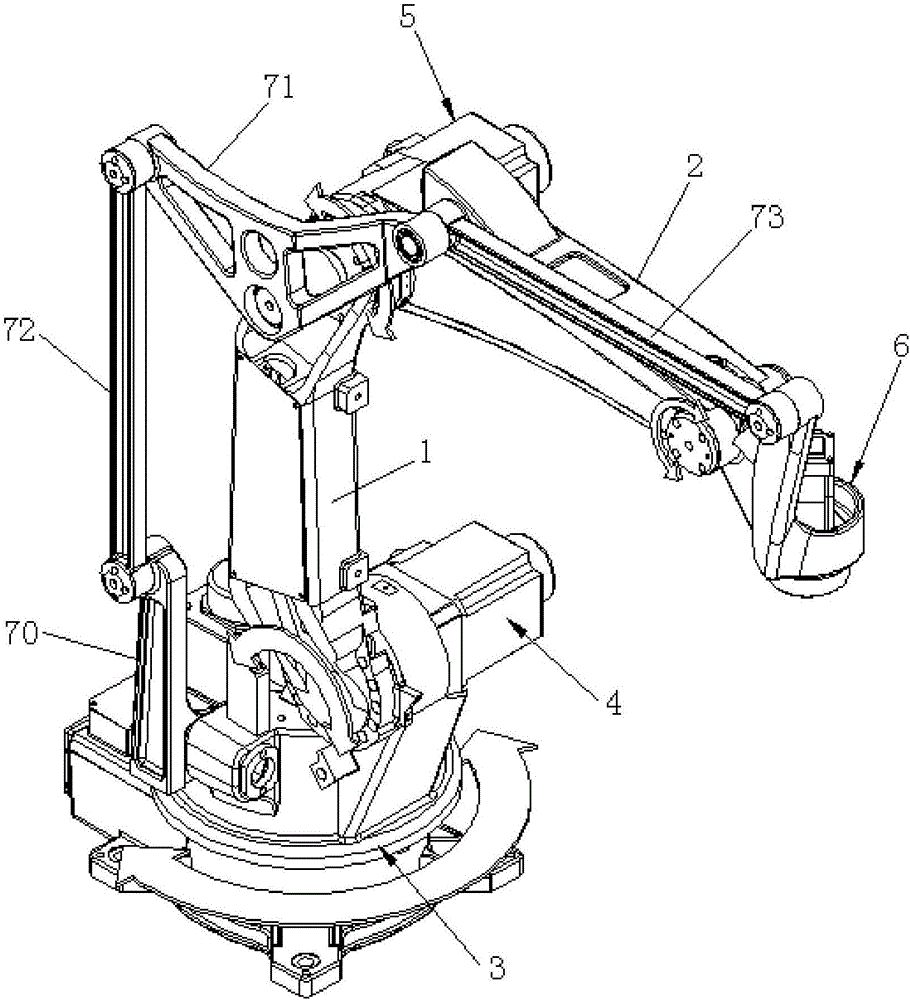
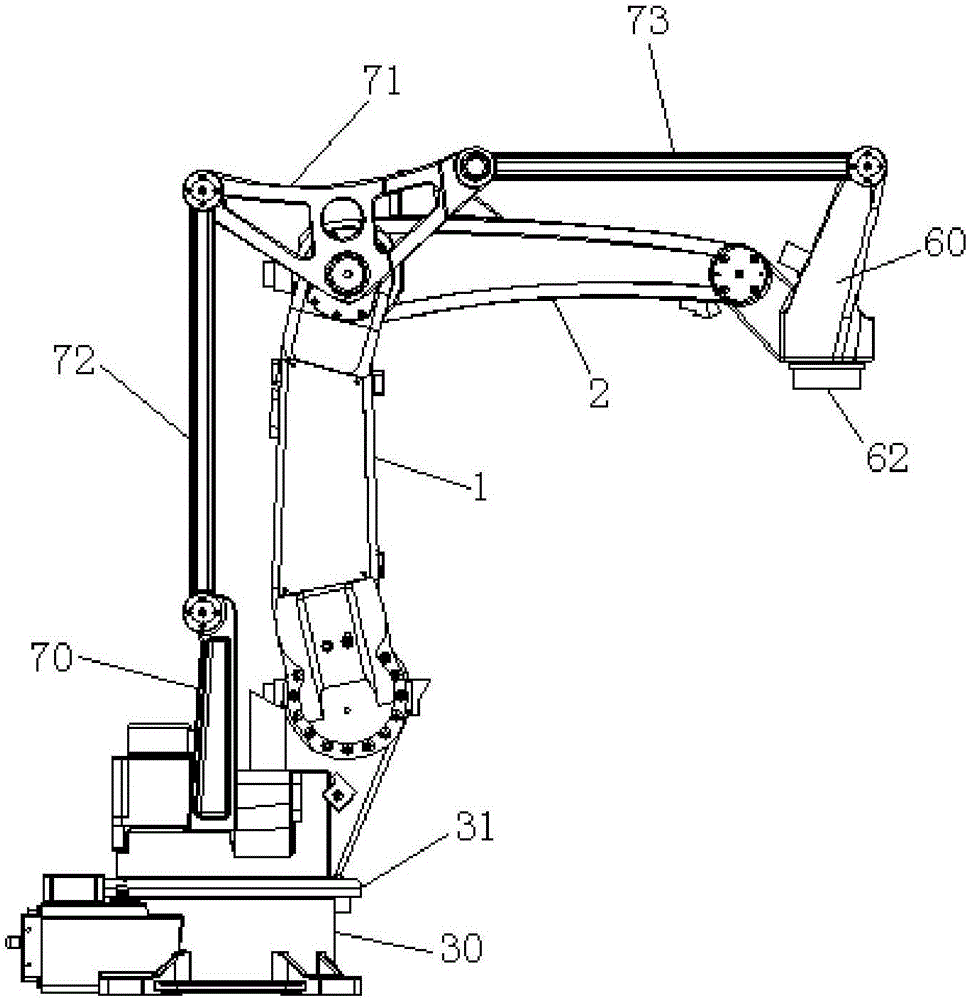
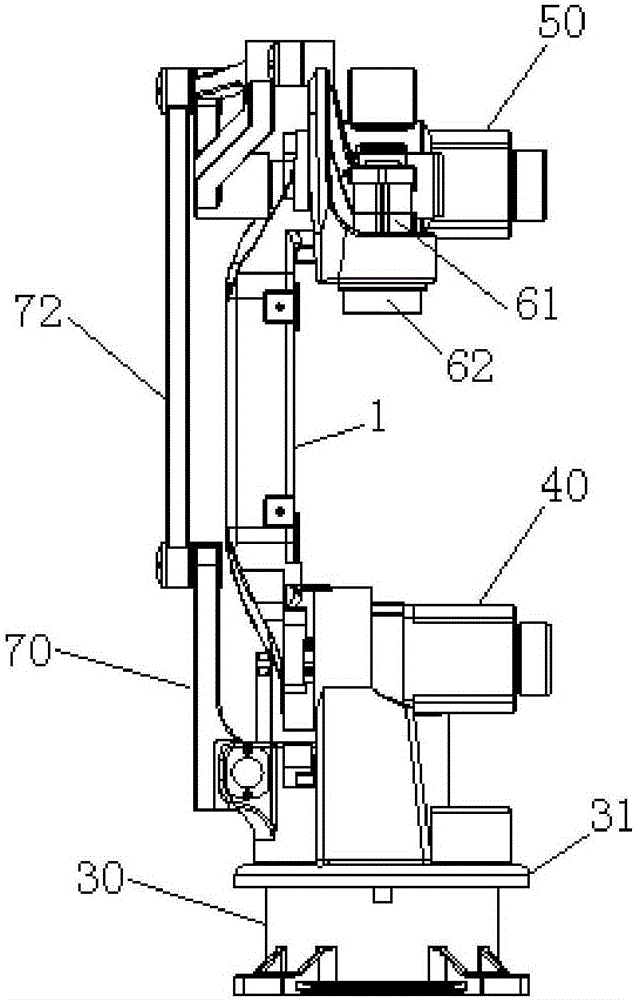
[0053] See attached Figure 1~3 As shown, the three-dimensional structure schematic diagram, the front view structural schematic diagram, and the side view structural schematic diagram of the first embodiment of the four-axis palletizing robot of the present invention are respectively shown. The four-axis palletizing robot includes a first swing arm 1, a second swing arm 2, a rotating seat 3, a first swing drive mechanism 4, a second swing drive mechanism 5, and an end effector 6, wherein the first swing arm A swing arm 1 is vertically arranged on the rotating base 3, and can rotate horizontally under the drive of the rotating base 3; the first swing driving mechanism 4 is also arranged on the rotating base 3, and the The first swing drive mechanism 4 can also drive the first swing arm 1 to swing back and forth; the second swing arm 2 is flexibly connected to the upper side of the first swing arm 1, and the second swing drive mechanism 5 is arranged on the second swing arm 2,...
Embodiment 2
[0065] See attached Figure 10-12 As shown, the three-dimensional structure diagram, the front view structure diagram, and the side view structure diagram of the second embodiment of the four-axis palletizing robot of the present invention are respectively shown.
[0066] The difference between the four-axis palletizing robot shown in Embodiment 2 and the four-axis palletizing robot shown in Embodiment 1 mainly lies in the difference in appearance and shape. The structural principle of each part / mechanism in the four-axis palletizing robot shown in embodiment 2, and the mutual connection relationship and action principle of each part / mechanism are all the same as embodiment 1 (see the attached Figures 13 to 18 ).
[0067] To sum up, compared with the prior art, the overall structure of the four-axis palletizing robot described in the present invention is simple, reasonable, and compact, with high transmission precision, stable operation, and large grabbing area; especially, ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More