

Particle filtering method based on Gaussian mixture model and variational Bayes
A Gaussian mixture model, variational Bayesian technology, applied in the field of signal processing, can solve problems such as inability to work, loss of work performance, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
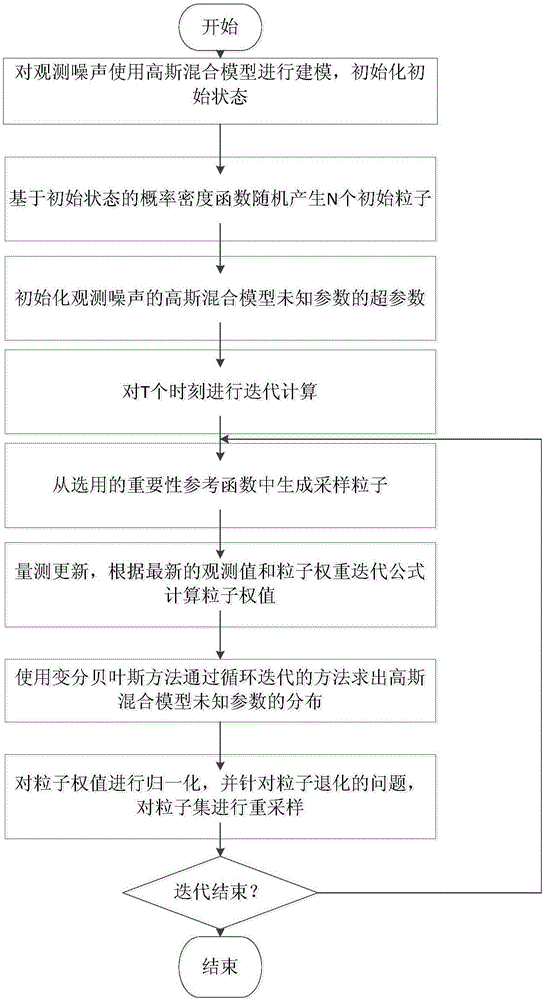
[0089] This embodiment provides a particle filter method based on Gaussian mixture model and variational Bayesian, such as figure 1 As shown in the flowchart of the method, the method includes the following steps:
[0090] 1. Use the Gaussian mixture model to model the observation noise, and initialize the probability density function p(x 0 ), the Gaussian mixture model formula is:
[0091]
[0092] where J represents the number of Gaussian terms of the Gaussian mixture model, α k,j Indicates the weight coefficient of the Gaussian term j at time k, Indicates that the mean is μ k,j , the covariance is Gaussian distribution;
[0093] 2. The probability density function p(x based on the initial state 0 ), randomly generate N initial particles, and N is used as a trade-off between calculation amount and estimation accuracy;
[0094] 3. Initialize the unknown parameters Ψ in the Gaussian mixture model of observation noise k The hyperparameter λ 0 , β 0 , m 0 , Σ 0a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More