

Indoor range finding positioning method based on improved traceless Kalman filtering
An unscented Kalman and Kalman filter technology, applied in radio wave measurement systems, positioning, measurement devices, etc., can solve the problems of non-line-of-sight errors and accuracy effects that cannot be suppressed
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
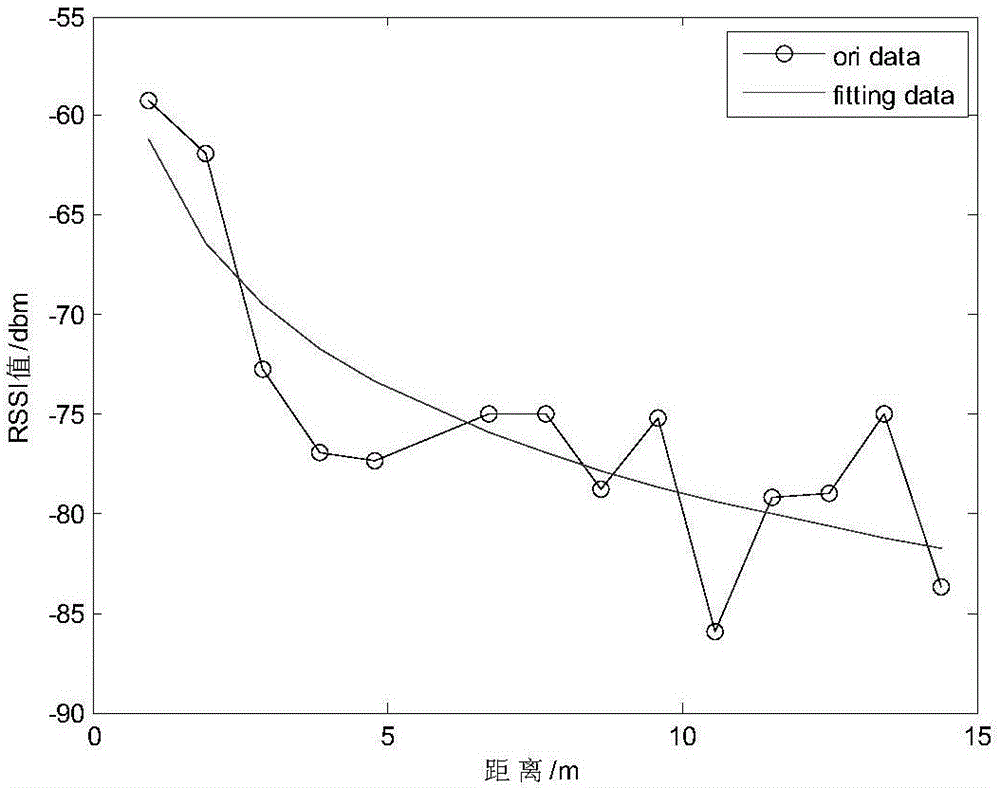
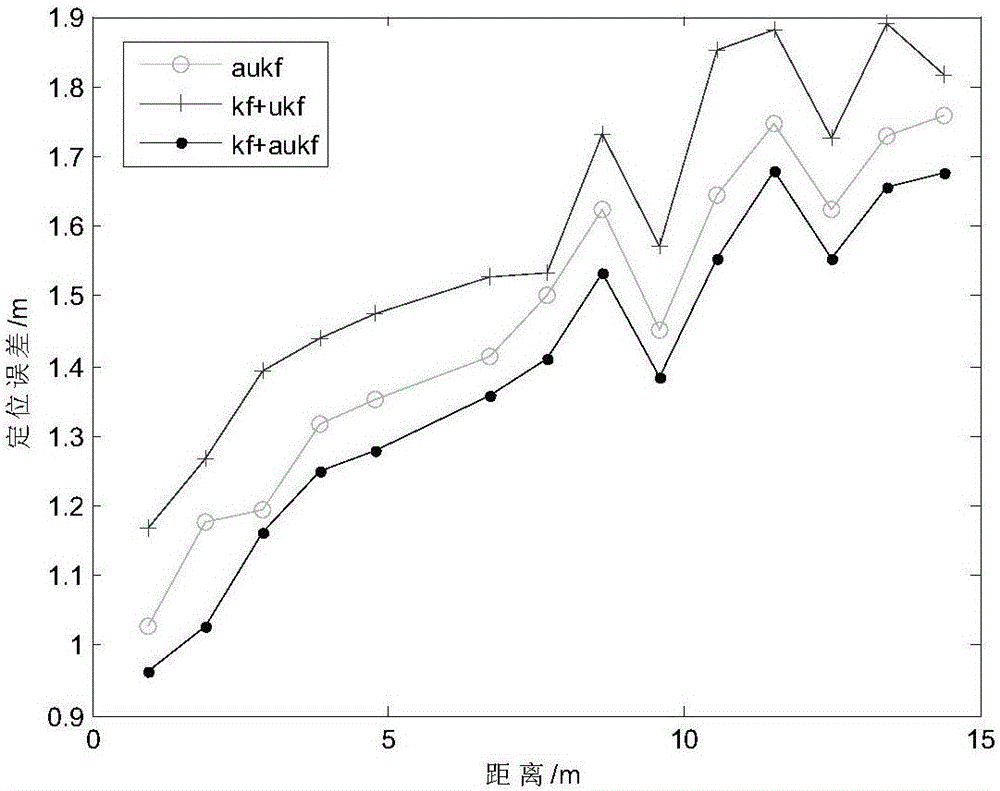
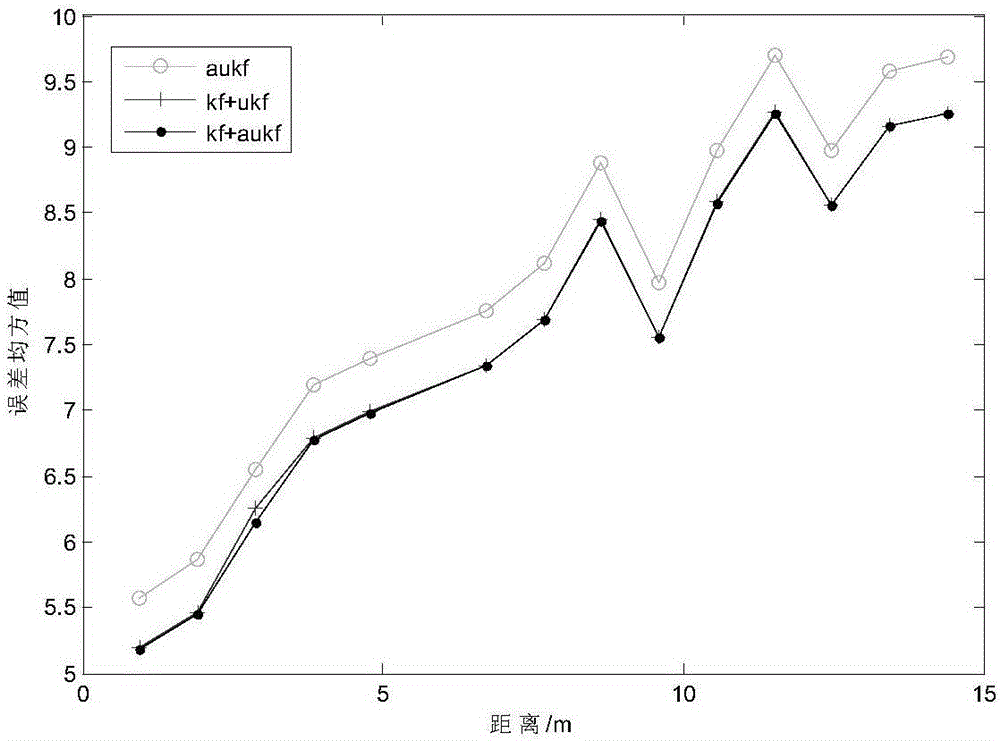
[0162] Set up two nodes in the laboratory, the transmitting node and the receiving node, and place them at the same height for data collection. The experimental range is 0-15m, and the measurement starts at 0.96m away from the transmitting node, and measures 100 RSSI at each interval of 0.96m. Value, the experimental data is processed accordingly, the distance value is the state value, the preprocessed RSSI value is the observation value, and the improved unscented Kalman filter method is used to obtain the distance value. The experimental results are as follows figure 2 , image 3 shown. From figure 2 and image 3It can be seen from the results that among the three processing methods, the data change of the improved unscented Kalman filter method (aukf) based on the logarithmic robust function is the largest, and the Kalman filter and the unscented Kalman filter (kf+ukf) are used to process The RSSI value, and the Kalman filter and the unscented Kalman filter improvement...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More