

Four-rotor aircraft system of autonomous navigation power line inspection fault detection
A quadcopter and power line inspection technology, applied in the field of quadcopter systems, can solve the problems of unable to calibrate the quadcopter flight control, reset and adjust the quadcopter, and unable to timely
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0065] In order to describe the present invention more specifically, the technical solutions of the present invention will be described in detail below in conjunction with the accompanying drawings and specific embodiments.
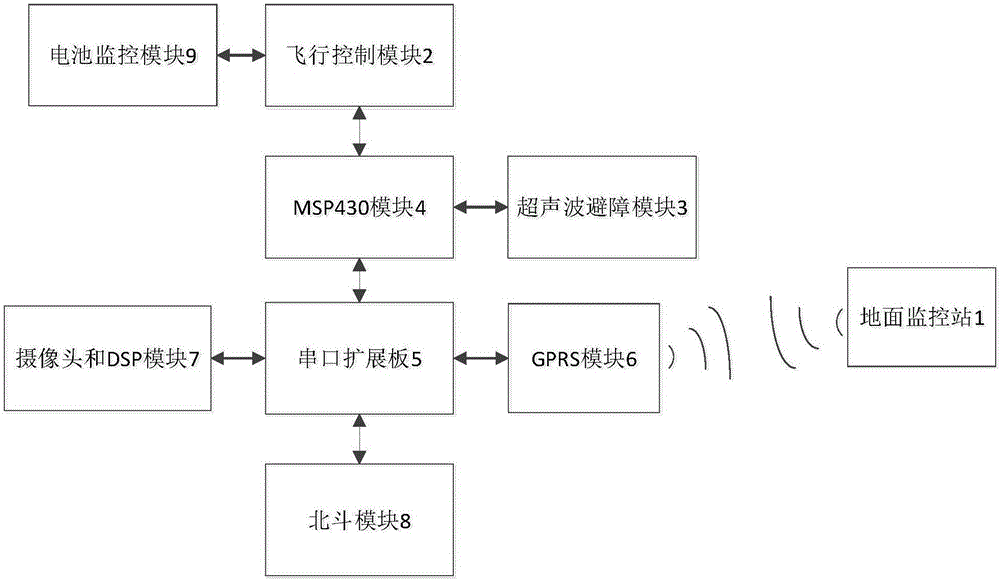
[0066] Such as figure 1 As shown, the electric line patrol quadrotor aircraft system of the present invention includes a ground monitoring station 1, a flight control module 2, an ultrasonic obstacle avoidance module 3, an MSP430 module 4, a serial port expansion board 5, a GPRS module 6, a camera and a DSP module 7, and a Beidou module 8. Battery monitoring module9.
[0067] The ground monitoring station 1 communicates remotely with the GPRS module 6, and can monitor the data of the aircraft in real time, including its flight path, current coordinates and flight attitude. The ground monitoring station 1 can set the aircraft patrol path, so that the aircraft can autonomously navigate along the path to complete the line inspection task, and can change the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More