

A multirotor unmanned aerial vehicle and a controlling method thereof
A multi-rotor UAV and rotor unmanned technology, which is applied in the direction of rotorcraft, electrical program control, control/regulation system, etc., can solve the problem of limited load capacity of the rotor UAV, and achieve the increase in the number of rotors and the load capacity. and the effect of stretch force improvement
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
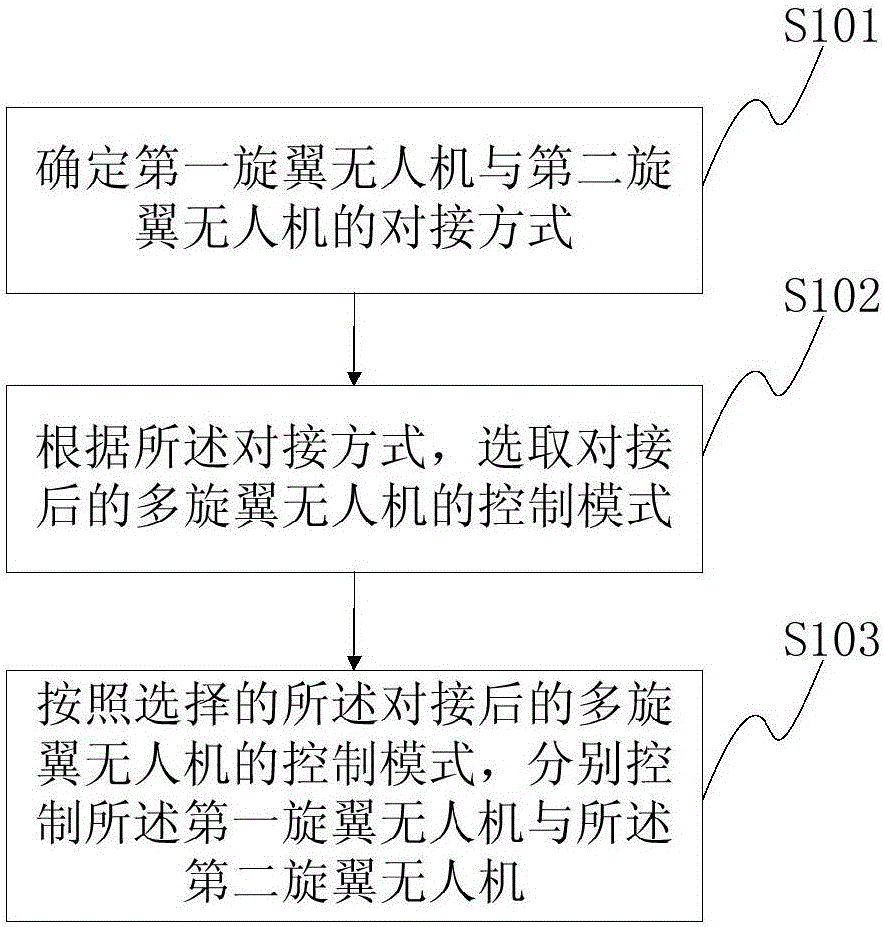
[0029] Embodiment 1 of the present invention provides a method for controlling a multi-rotor UAV. figure 1 It is a flow chart of the control method of the multi-rotor UAV provided in this embodiment.
[0030] The control method of the multi-rotor UAV in this embodiment is used for controlling the docking of multiple UAVs and controlling the docked UAVs. The control method includes the following steps:
[0031] S101. Determine the docking mode of the first rotor UAV and the second rotor UAV.
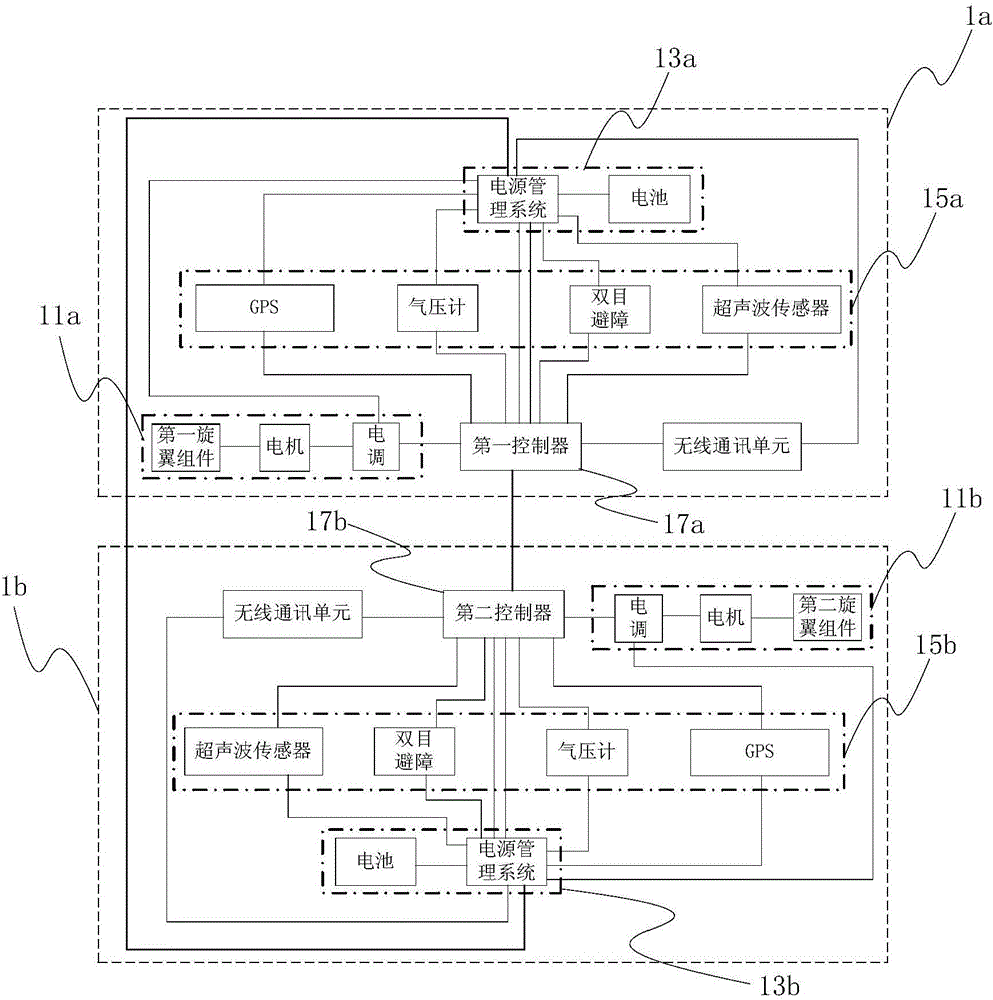
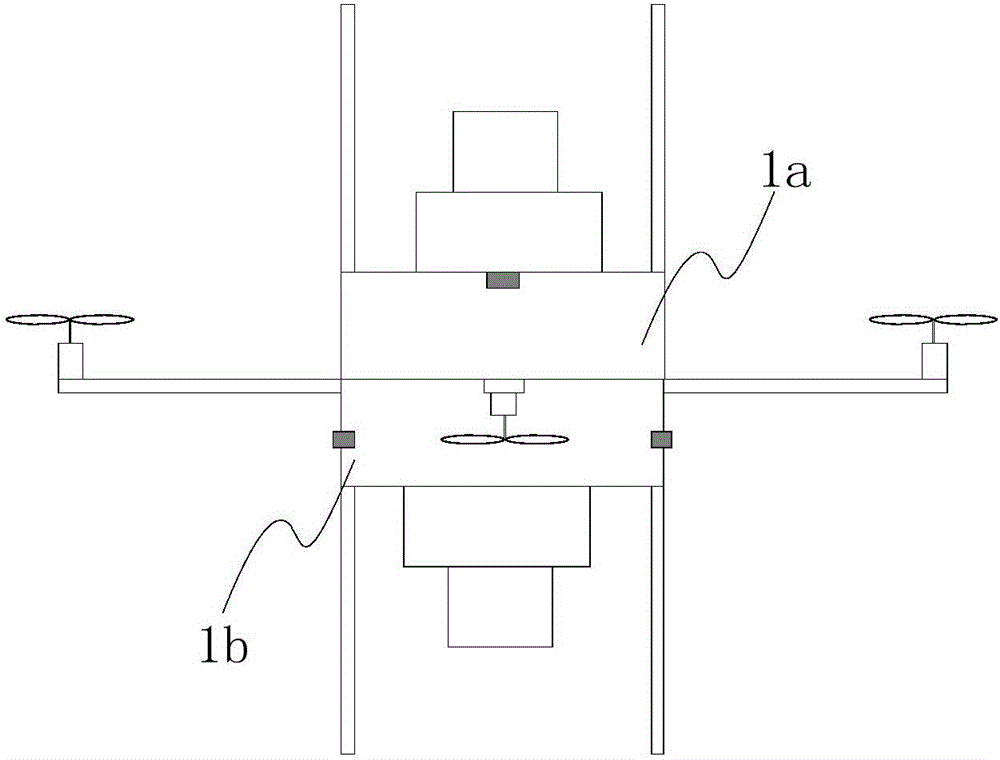
[0032] Specifically, the docking manner of the first rotor drone 1a and the second rotor drone 1b is not specifically limited in this embodiment. For example, in the way of fixed connection, detachable connection or non-detachable connection can be adopted. Moreover, in this embodiment, the detachable connection or the non-detachable connection can be selected in any manner in the prior art. For another example, in the butt joint direction, the butt joint can be performed in the axial...
Embodiment 2
[0041] This embodiment provides a method for controlling a multi-rotor UAV.
[0042] The control method of this implementation is on the basis of embodiment 1, also comprises the following steps:
[0043] establishing a communication connection between the first rotor drone and the second rotor drone;
[0044] Selecting one of the first rotor UAV and the second rotor UAV as the host, for controlling the host and the slave respectively according to the selected control mode of the docked multi-rotor UAV machine.
[0045] Specifically, the way to establish the communication connection between the first rotor UAV and the second rotor UAV can be a wired connection or a wireless connection, for example, it can be set on the first rotor UAV and the second rotor UAV. Communication terminals and joints that cooperate with each other, or wireless communication modules can be set on the first rotor drone and the second rotor drone, such as wifi modules, bluetooth modules; or the first...
Embodiment 3
[0050] This embodiment provides a method for controlling a multi-rotor UAV.
[0051] In the control method of this embodiment, on the basis of Embodiment 1 or 2, the control mode of the docked multi-rotor UAV is set to include: coaxial control mode and non-coaxial control mode.
[0052] Among them, the coaxial control mode means that the first rotor drone and the second rotor drone are docked in the axial direction, and the upper and lower rotors of the docked multi-rotor drone are on the same axis, for example, two The rotors of a quadrotor UAV are completely stacked together. The different-axis control mode means that the rotors of the first rotor UAV and the second rotor UAV are staggered in the radial direction, for example, two UAVs dock in the radial direction, or, However, the rotors of the two are offset by a certain distance in the radial direction. It should be noted that the non-coaxial control mode also includes the situation that the rotor parts of the first rot...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More