

Tomato Bunch Harvesting Manipulator End Effector and Method
A technology of end effectors and manipulators, applied to harvesters, agricultural machinery and implements, picking machines, etc., to achieve reliable work, compact structure, and excellent performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0018] The present invention will be further explained below with reference to the drawings and examples. The technical features in the following examples can be combined with each other if there is no conflict.
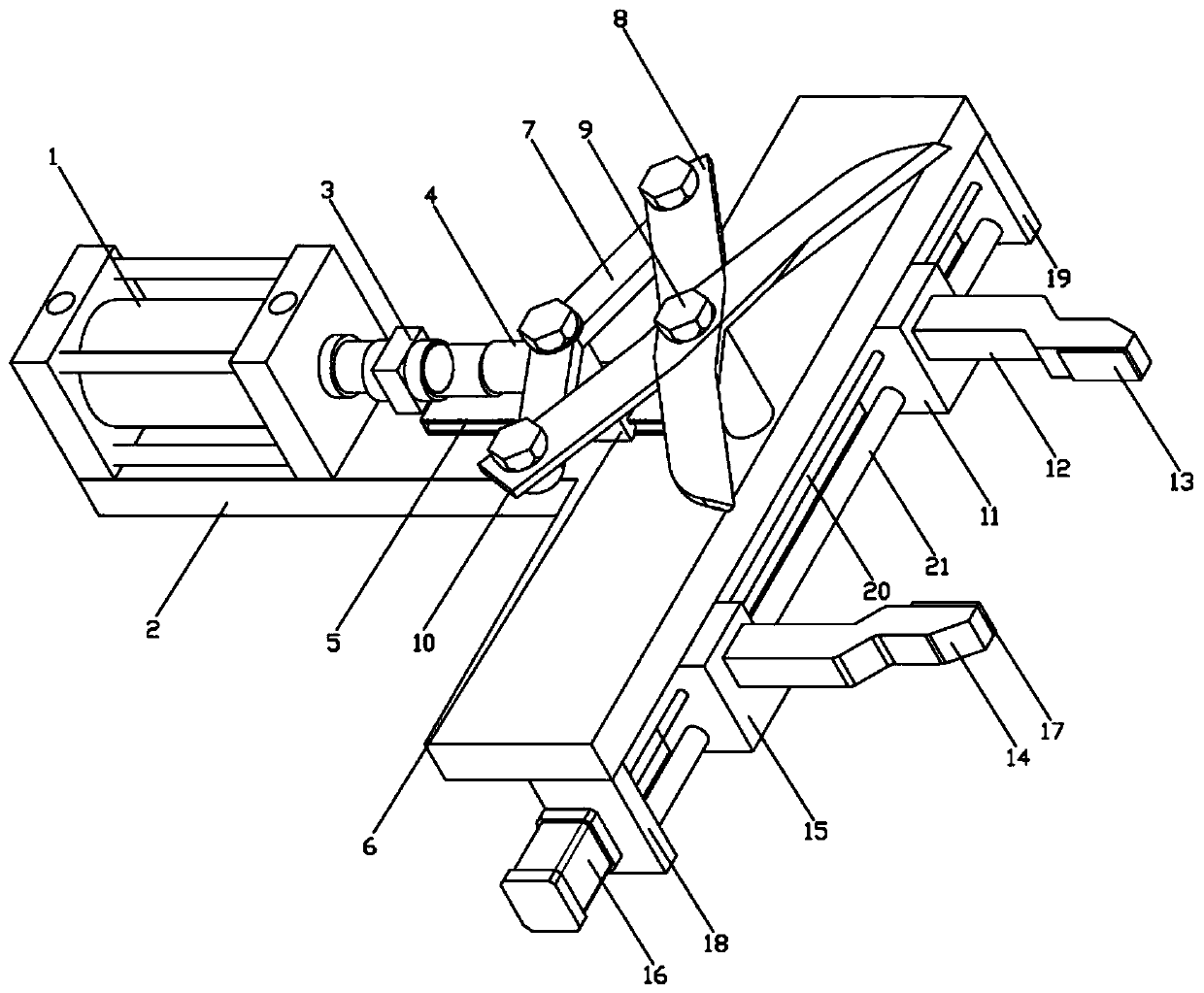
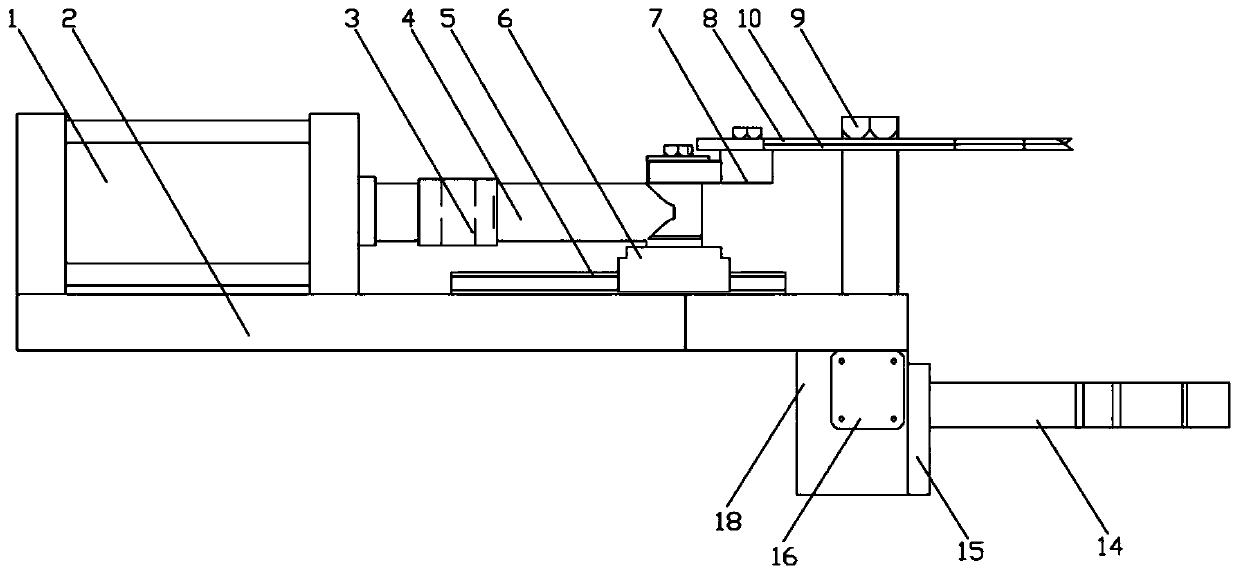
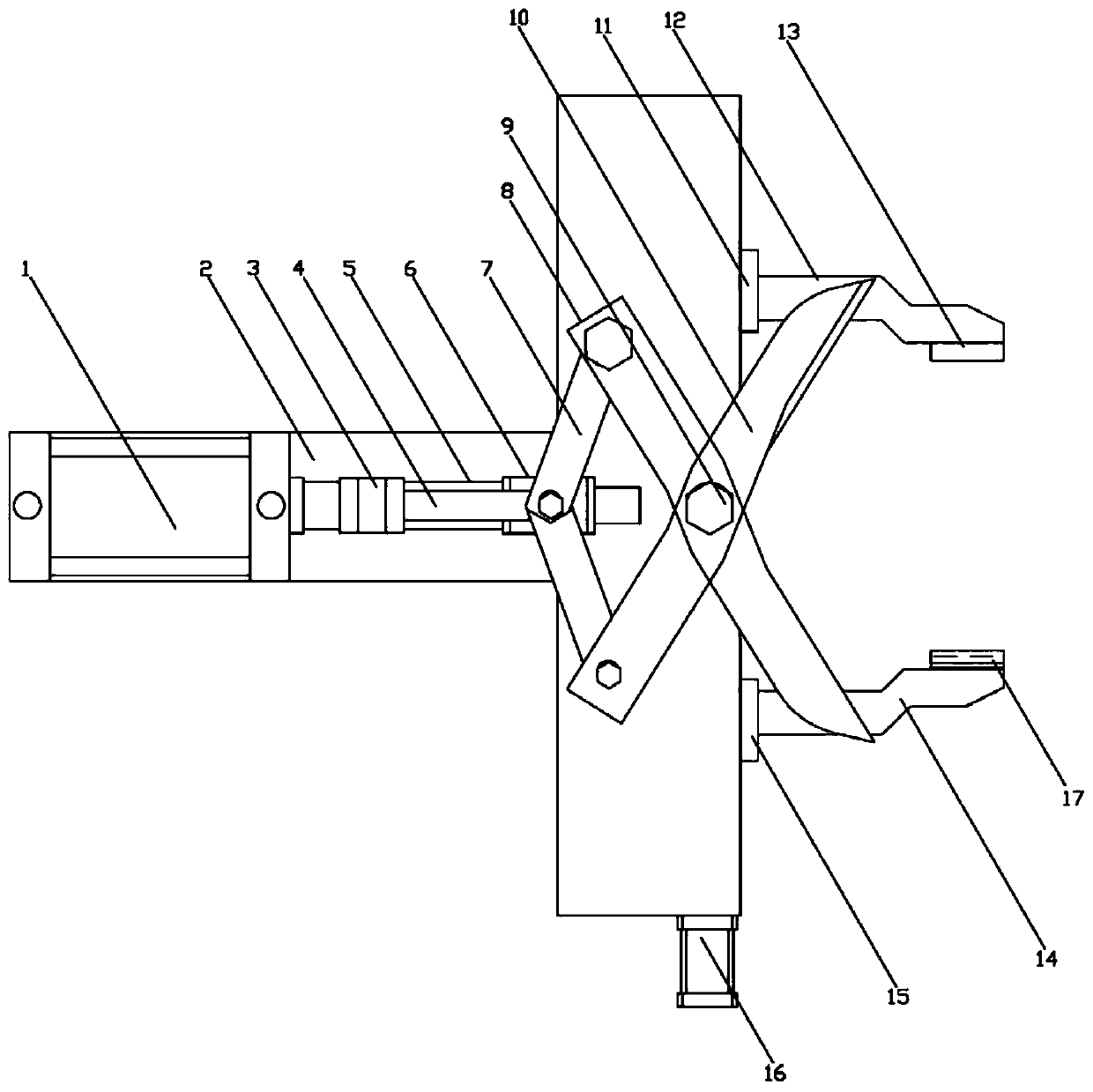
[0019] Such as figure 1 , figure 2 , image 3 , Figure 4 As shown, the end effector of the tomato fruit bunch harvesting manipulator includes a T-shaped frame 2, a cutting mechanism, a clamping mechanism and a control system. The cutting mechanism is installed above the T-shaped frame 2, and the clamping mechanism is installed on the front and bottom of the T-shaped frame 2;
[0020] The clamping mechanism includes a left-handed sliding block 11, a left-handed clamping arm 12, a right-handed clamping arm 14, a right-handed sliding block 15, a stepping motor 16, a flexible gasket 17, a right bracket 18, a left bracket 19, a two-way screw 20, The guide rod 21, the right bracket 18, and the left bracket 19 are respectively fixed at the lower part of the two ends of the T-...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More