Changing rigidity elbow joint rehabilitation robot based on man-machine impedance matching model and controlling method of changing rigidity elbow joint rehabilitation robot
A rehabilitation robot and impedance matching technology, applied in passive exercise equipment, physical therapy and other directions to increase flexibility and comfort, speed up the rehabilitation process, and avoid rigid impact injuries
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0027] The present invention is described in further detail below in conjunction with accompanying drawing:
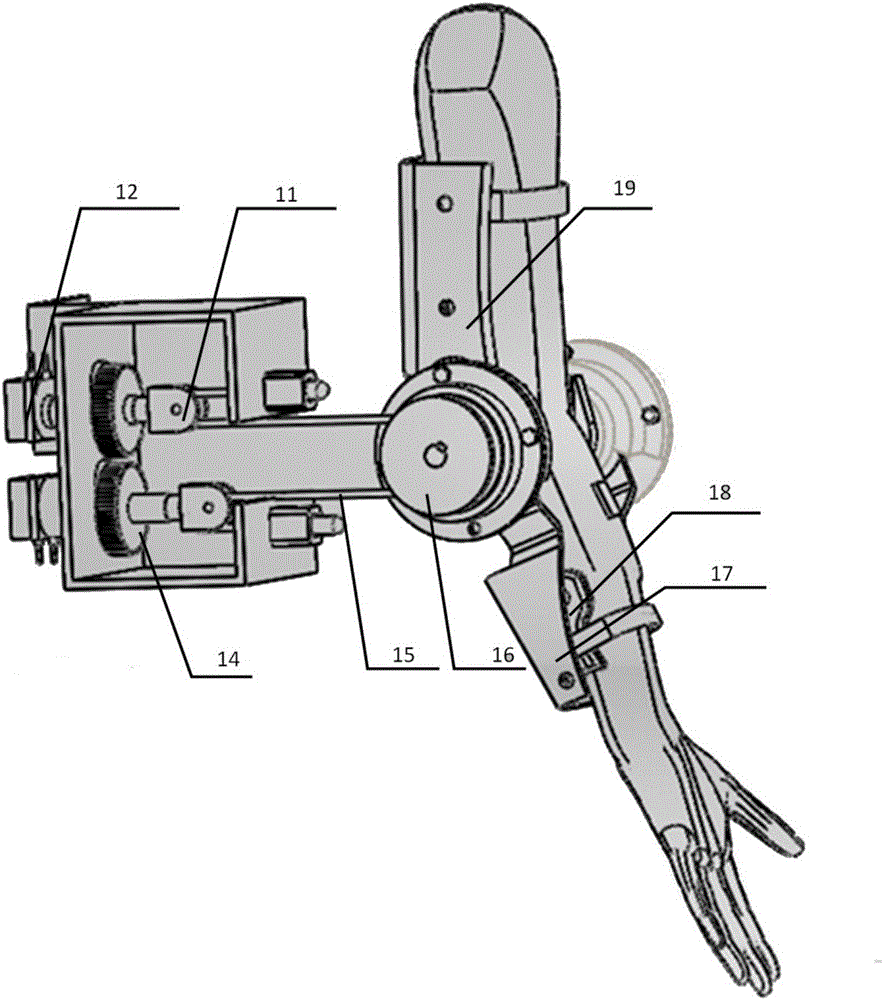
[0028] see figure 1 and figure 2 , the variable stiffness elbow joint rehabilitation robot based on the man-machine impedance matching model of the present invention is characterized in that it includes a drive mechanism and an execution mechanism; the drive mechanism is fixed on the lifting column, and the execution mechanism adopts an exoskeleton arm guard that can work with the patient's arm 19; the exoskeleton arm guard 19 connects the transmission mechanism with the driving mechanism through a wire rope. The driving mechanism adopts two servo motors 12 fixed on the lifting column, and the lifting column is fixed on the ground. The transmission mechanism includes a gear set 14 respectively installed on the output shafts of two servo motors 12. The shaft of the gear set 14 is fixedly installed with the first pulley 11 through a tensioning sleeve, and the forearm ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com