

Parallel wrist joint rehabilitation training device based on self-adaptation
A rehabilitation training and self-adaptive technology, applied in the direction of passive exercise equipment, physical therapy, etc., to achieve the effects of solving compatibility problems, stable driving, and low manufacturing cost
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
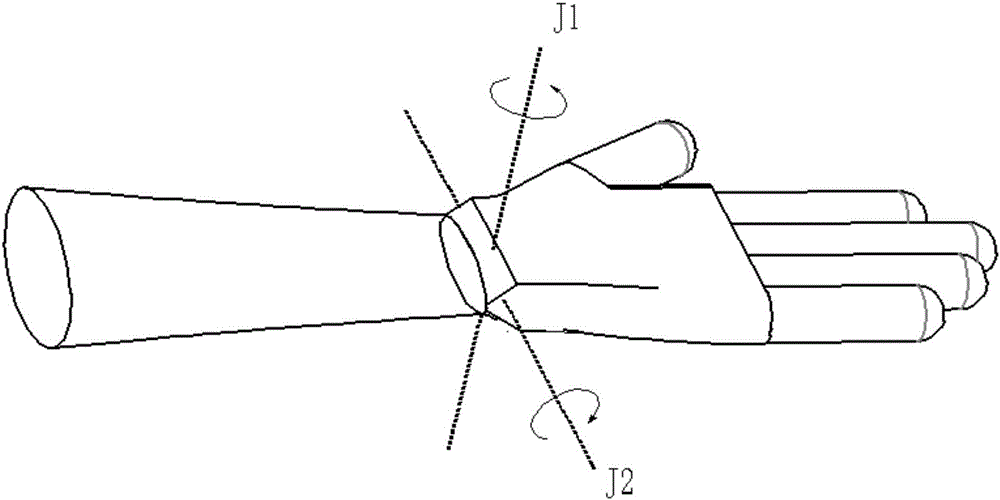
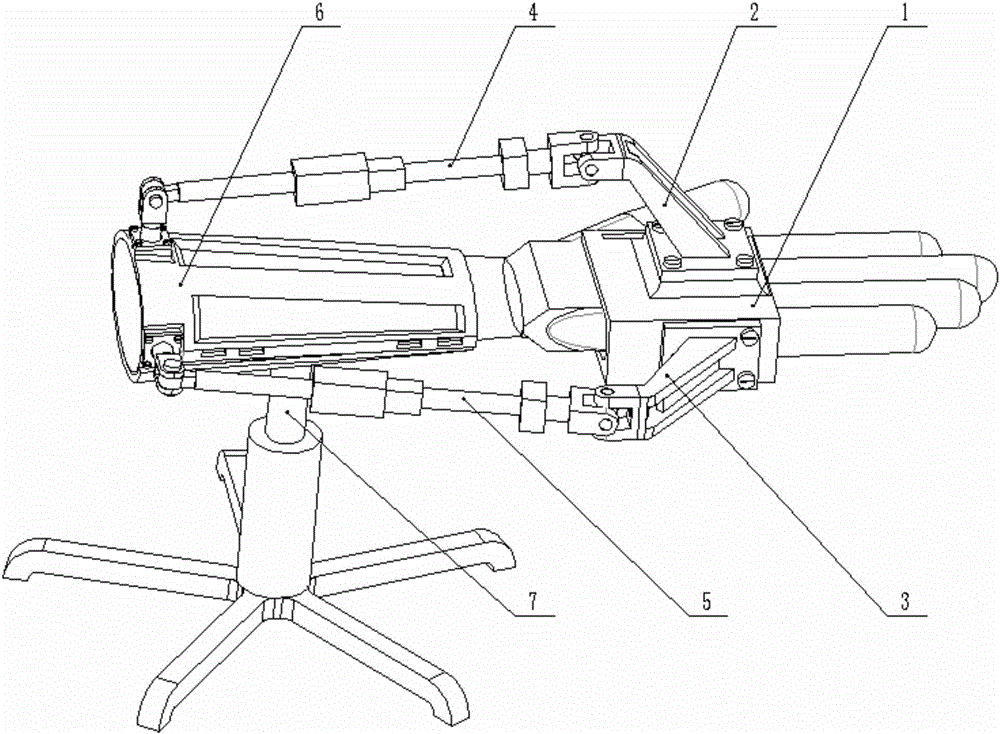
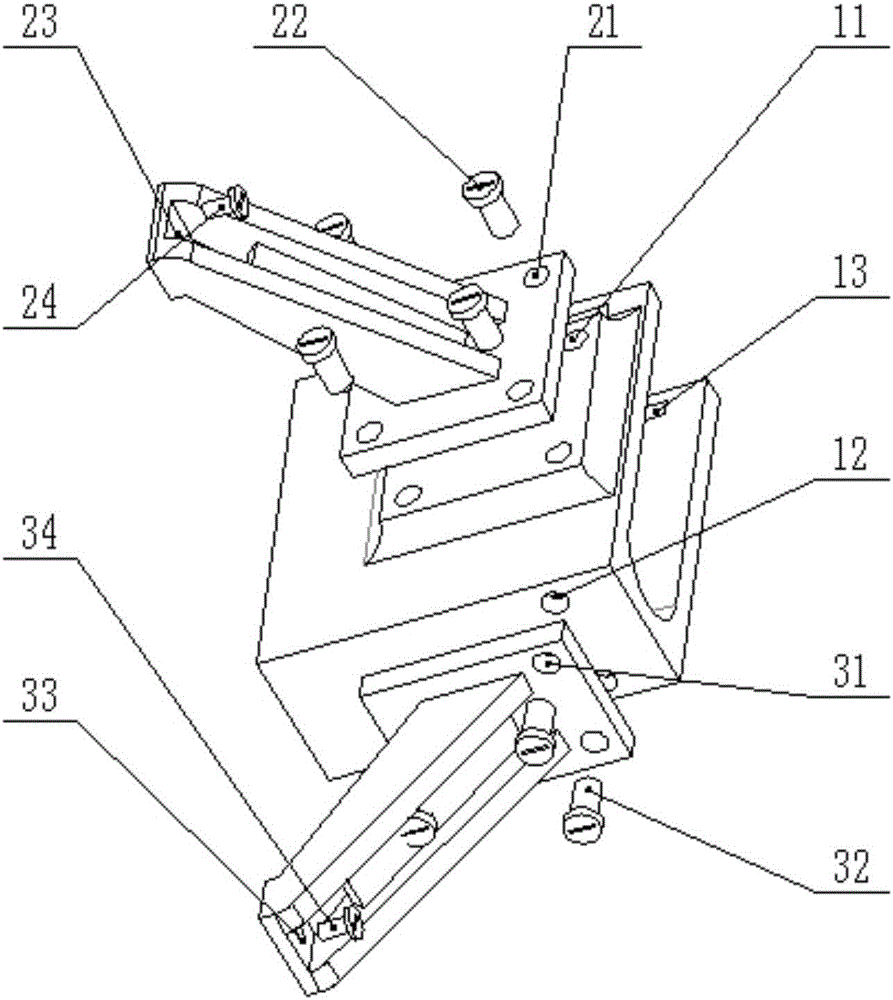
[0027] Such as figure 1 — Figure 5As shown, the present invention is a kind of self-adaptive parallel wrist joint rehabilitation robot, which has two rotational degrees of freedom and adopts a parallel structure: that is, a parallel mechanism of two drive branch UPSs. The device mainly includes a hand support (1), a top support (2), a side support (3), a first branch chain (4), a second branch chain (5), a forearm support frame (6), a forearm support (7 ). In the process of rehabilitation training, the patient's forearm is first bound to the forearm support (6) with an elastic strap, the patient's hand is bound to the hand support (1), and then the arm is placed on the forearm support (7) Before binding, try to adjust the posture of the patient's forearm and palm to prevent a large displacement between the man and the machine, which will make the patient feel uncomfortable during the rehabilitation process and cause secondary damage.
[0028] After the rehabilitation devic...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More