Exoskeleton mechanical-leg rehabilitation system standing mode control method
A mode control, mechanical leg technology, applied in passive exercise equipment, medical science, diagnosis, etc., can solve problems such as unreliable additional torque, unable to fully reflect muscle state, etc., to achieve the effect of easy implementation and simple control method
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach
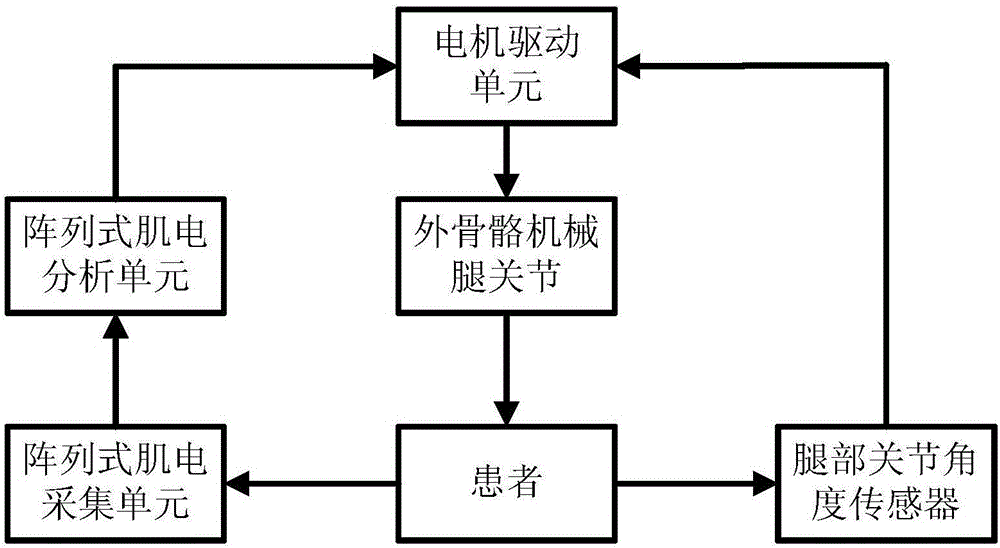
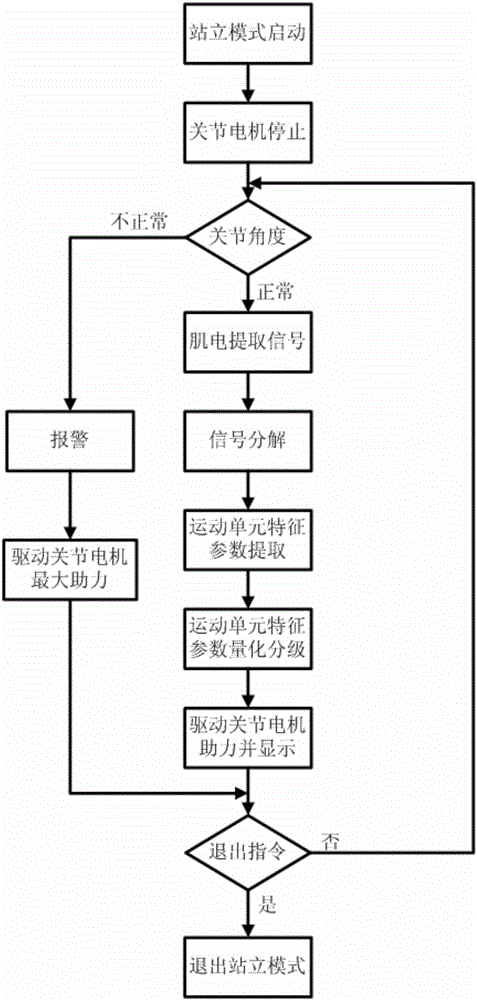
[0022] The invention discloses a standing mode control method of an exoskeleton mechanical leg rehabilitation system. The exoskeleton mechanical leg rehabilitation system includes two mechanical legs, and each mechanical leg includes a hip joint motor and a knee joint motor, which can be assisted by the rotation of the motors. Hip and knee. The control principle of the two legs is the same, and the motor of each joint adjusts the output torque according to the state of the muscles. The specific implementation method comprises the following steps:
[0023] Step 1: Paste the arrayed surface electrodes on the muscles of the left and right legs, namely the quadriceps of the thigh and the gastrocnemius of the calf. Before pasting, clean the skin surface with medical sandpaper and alcohol, and place the electrodes on the muscle belly of the muscle , according to the patient's muscle size, the number of array electrodes can be appropriately increased, and the electrodes are distribu...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com