

Deceleration driving device based on double servo motors, drive system and control method
A technology of double servo motors and servo motors, which is applied in the drive system and the control of eliminating output gaps, and in the field of deceleration drive devices, can solve the problems of decreased positioning accuracy, enlarged gaps, affecting accuracy and speed, etc., to avoid gaps from becoming larger, High control accuracy, stable and reliable structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0030] In order to describe the technical content, structural features, achieved goals and effects of the present invention in detail, the following will be described in detail in conjunction with the embodiments and accompanying drawings.
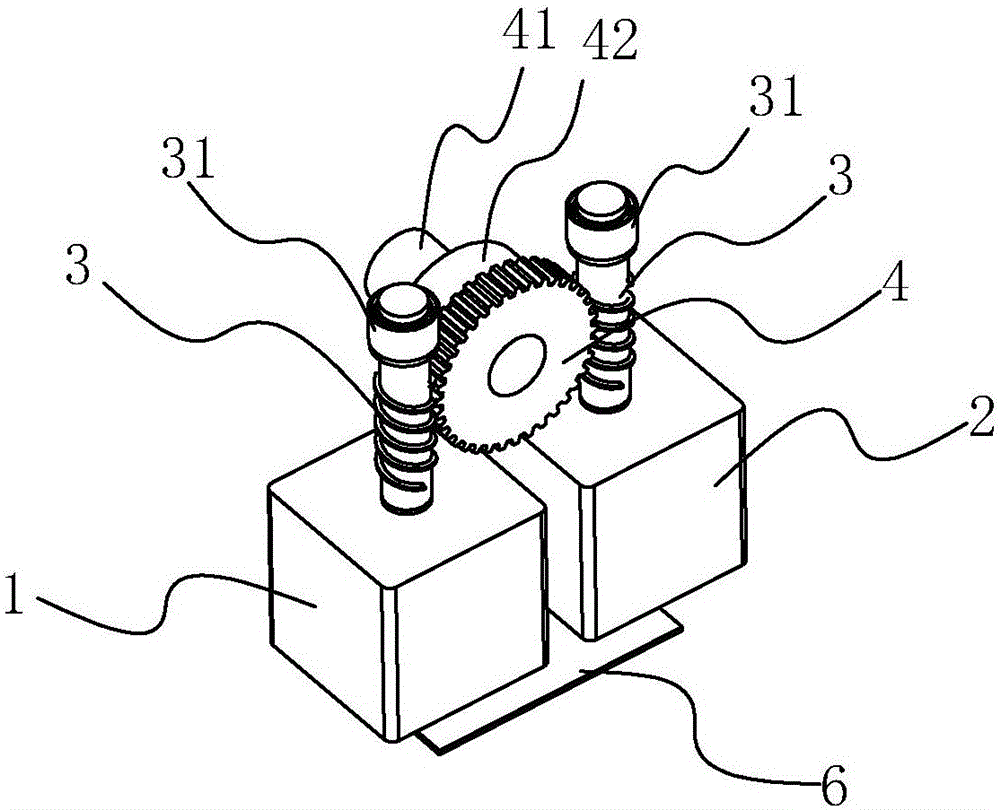
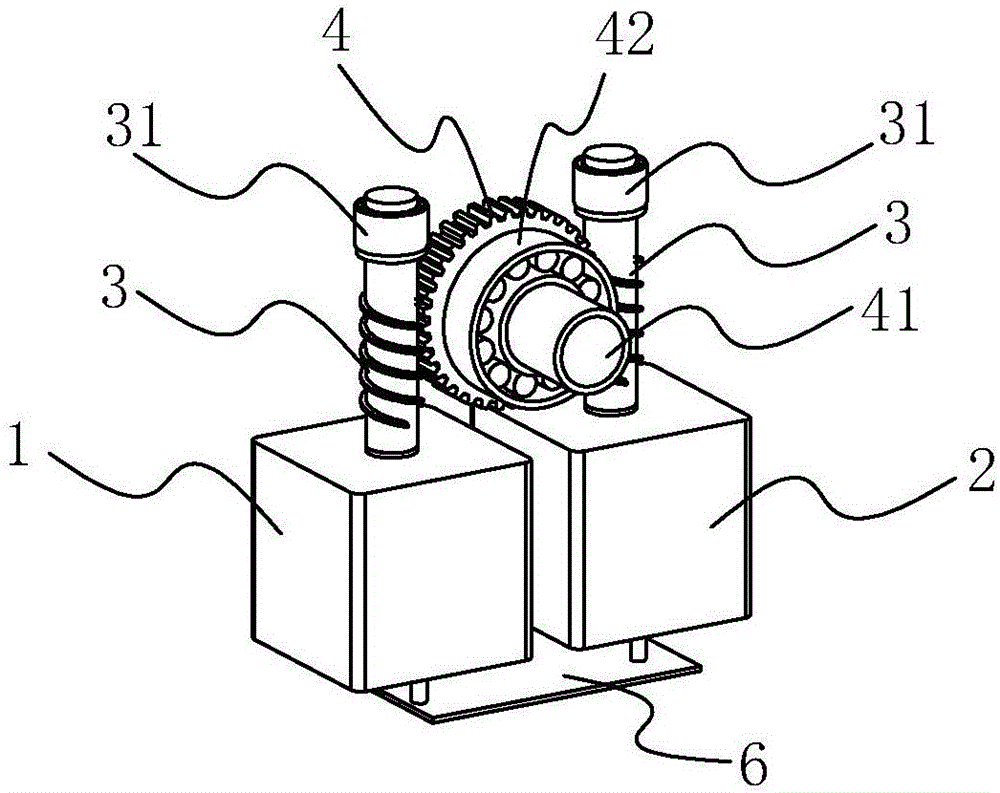
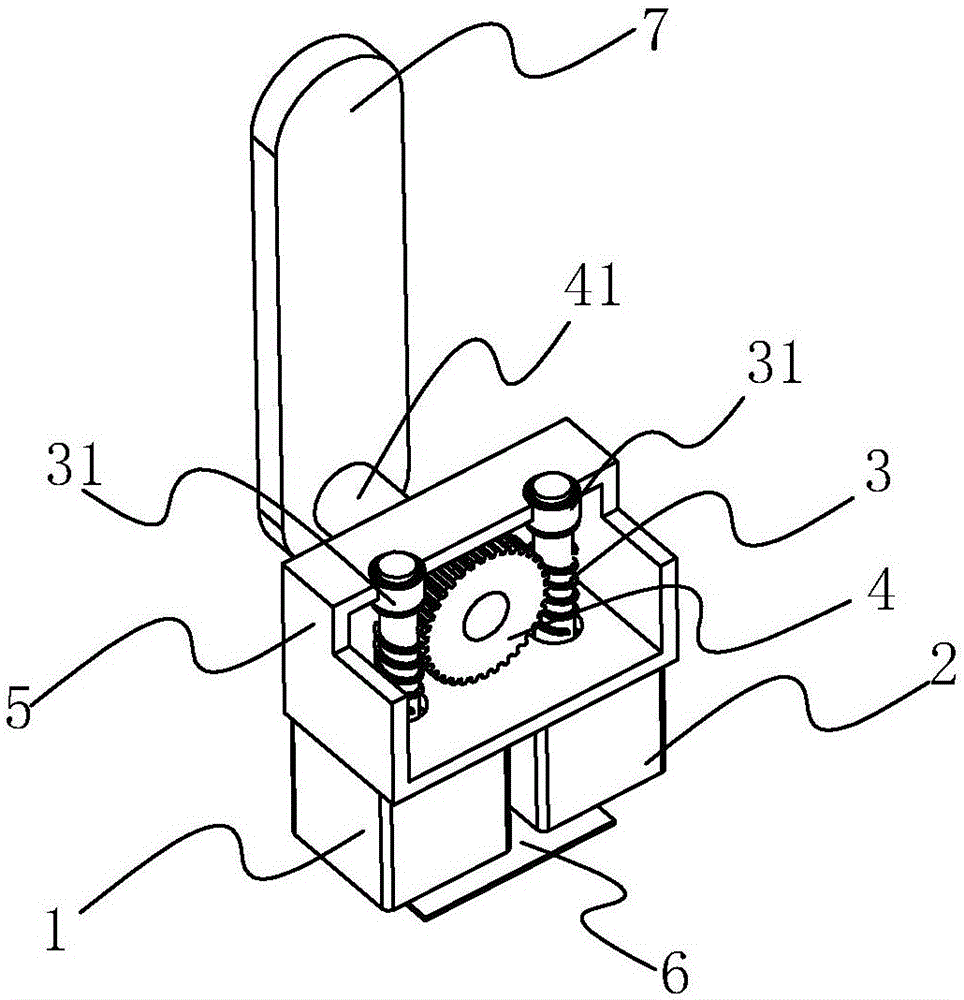
[0031] see figure 1 A deceleration drive device based on double servo motors provided by the present invention includes a housing 5 in which a first servo motor 1, a second servo motor 2 and a drive circuit board 6 are arranged. The first The output ends of the servo motor 1 and the second servo motor 2 are provided with a worm 3, and the housing 5 is also provided with a worm wheel 4 synchronously driven by the two worms 3, the worm wheel 4 has an output shaft 41, and the first Both the first servo motor 1 and the second servo motor 2 are driven by the output of the driving circuit board 6 . The combination of double servo motors and worm gear 4 worms is adopted. The two servo motors each have a worm 3 and drive the worm gear 4 to rotate...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More