

Virtual scene interaction-based rehabilitation training robot system and use method thereof
A robot system and rehabilitation training technology, applied in the field of rehabilitation training robot system based on virtual scene interaction, can solve the problems of patients' realistic immersion and interactive experience, lack of scene interaction ability, unfavorable patient rehabilitation training, etc., to achieve self-adaptation and targeted Strong performance, improving the efficiency of rehabilitation training, and the effect of friendly human-computer interaction
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0033] The technical solutions of the present invention will be described in detail below, but the protection scope of the present invention is not limited to the embodiments.
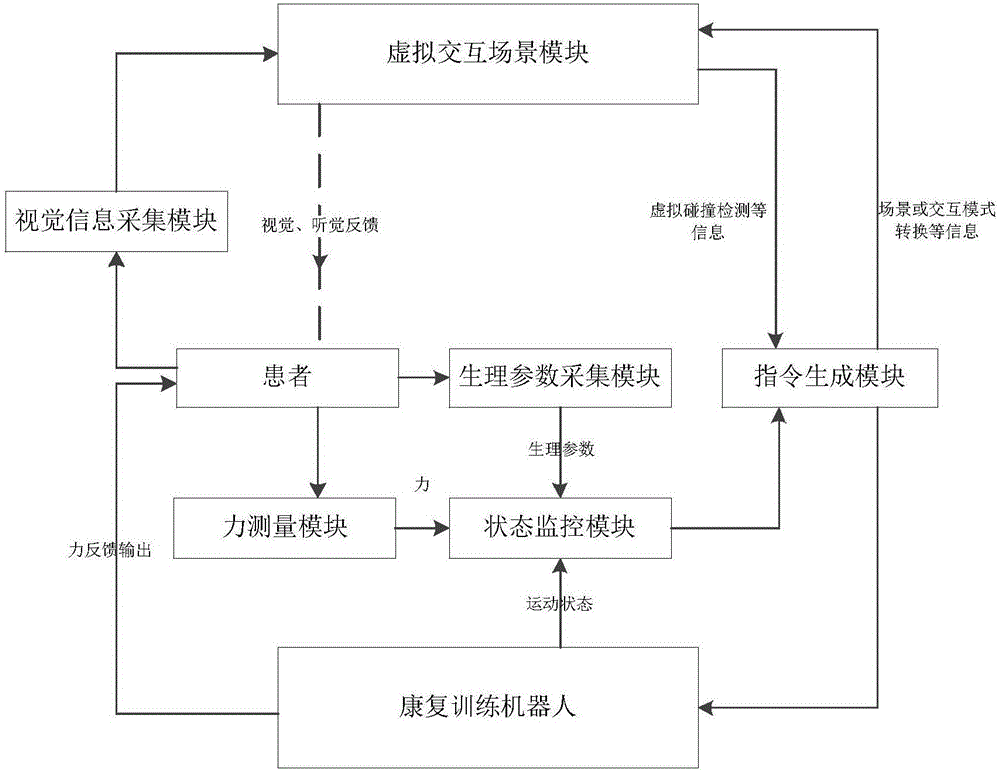
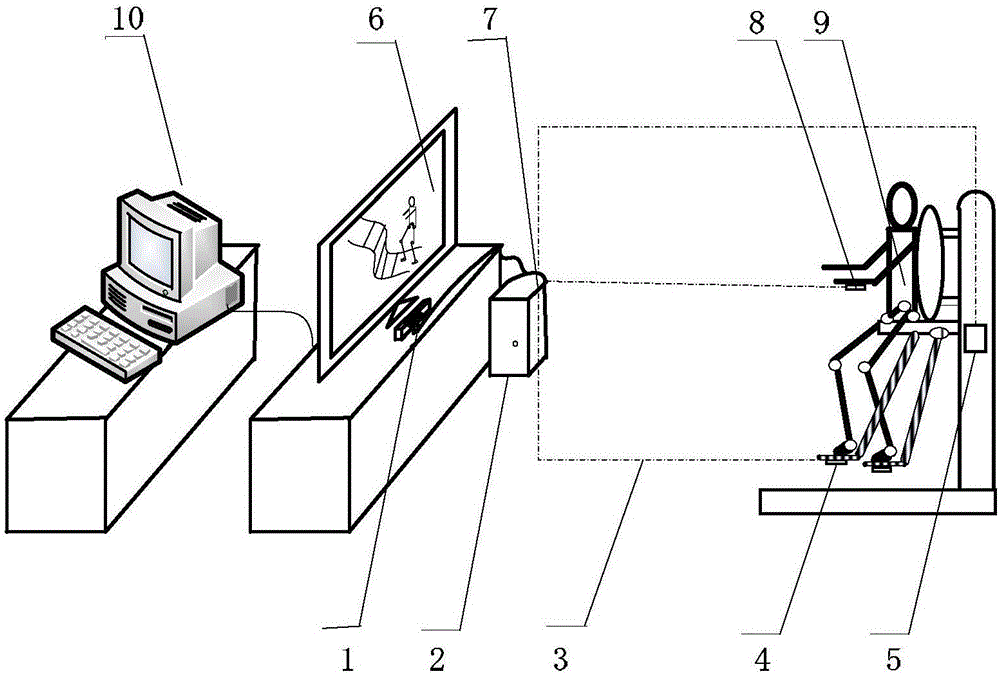
[0034] Such as figure 1As shown, the present invention discloses a rehabilitation training robot system based on virtual scene interaction, including a virtual interaction scene module 6, a visual information collection module 1, a physiological parameter collection module 8, a force measurement module 4, a state monitoring module 7, and an instruction generation module Module 2 and rehabilitation training robot 5, wherein: the virtual interaction scene module 6 provides real-time visual and auditory interaction for the patient 9, and the visual information acquisition module 1 collects the somatosensory information of the patient 9 in real time by the camera and serves as the input of the virtual interaction scene module 6, The physiological parameter acquisition module 8 realizes the real-time physio...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More