

Acquisition method and acquisition device of color depth image
A technology of color depth and acquisition method, applied in the field of image processing, which can solve the problems of missing, low precision, and multiple data.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
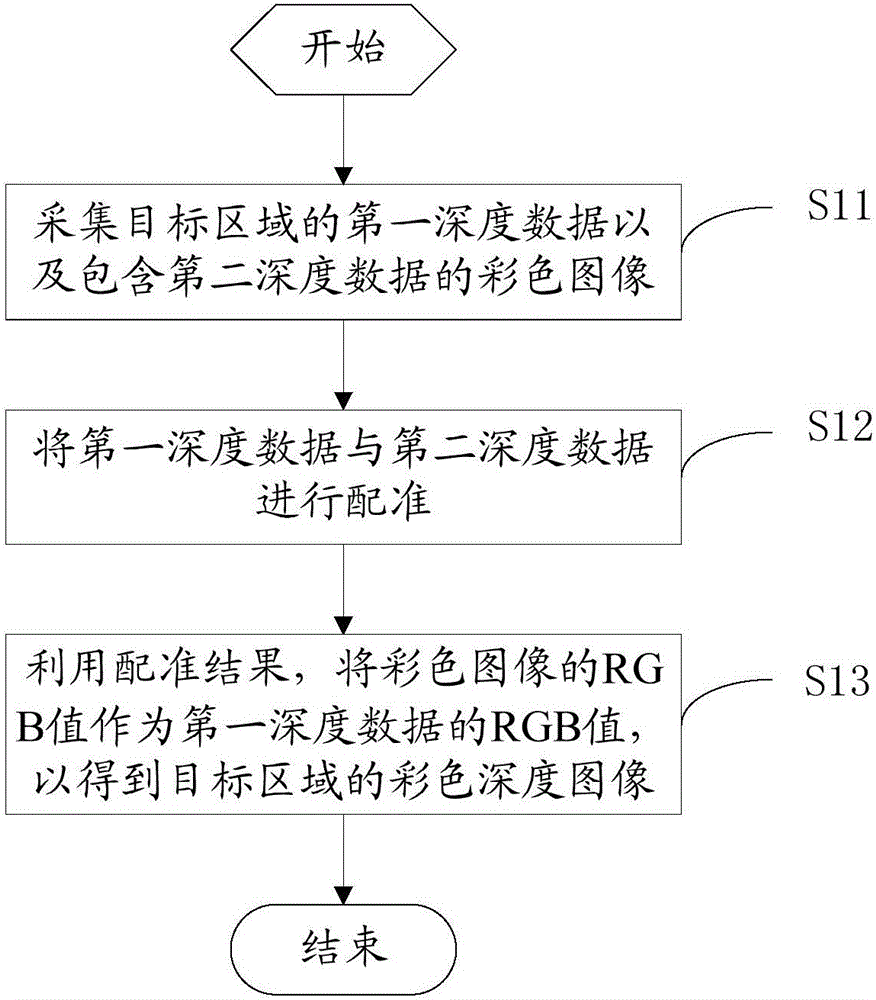
[0024] refer to figure 1 , figure 1 It is a schematic flow chart of an embodiment of a method for acquiring a color depth image in the present invention, and the method includes:
[0025] S11: Collect the first depth data of the target area and a color image including the second depth data.
[0026] Wherein, the accuracy of the first depth data is greater than that of the second depth data.
[0027] Wherein, the first depth data refers to depth information including multiple spatial points in the target area, and the depth information may be distance or three-dimensional coordinates.
[0028] Optionally, in an embodiment, the first depth data is 3D point cloud data.
[0029] With the development of 3D imaging technology, there are various types of sensors, measuring devices and imaging systems that can be used to obtain 3D point cloud data. Take the LIDAR imaging system as an example. Generally, a LIDAR system uses a high-energy laser, an optical detector, and a timing cir...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More