

Reinforcement learning controller of bearingless permanent-magnet synchronous motor and construction method of reinforcement learning controller
A technology of permanent magnet synchronous motor and reinforcement learning, which is applied in the direction of motor generator control, electronic commutation motor control, control of electromechanical brake, etc., can solve the problem of strong anti-load disturbance ability and achieve good robustness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
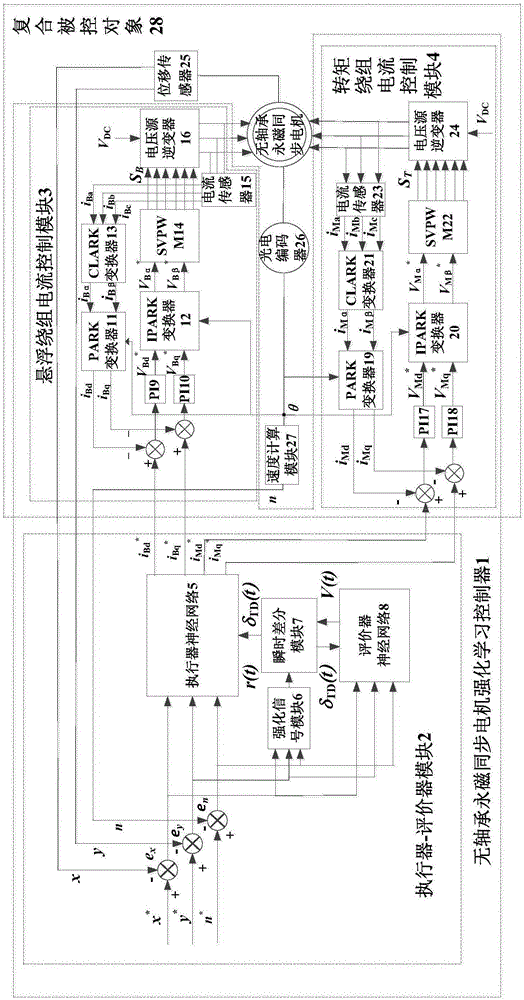
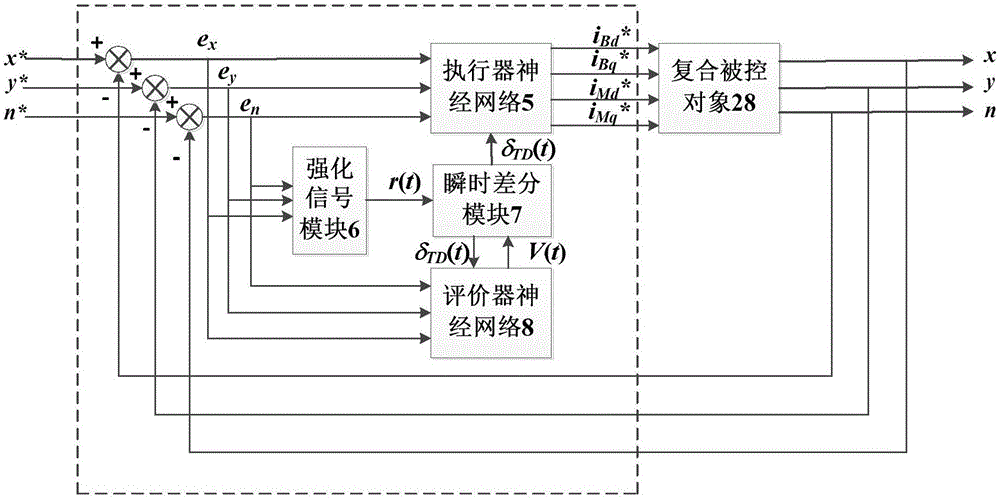
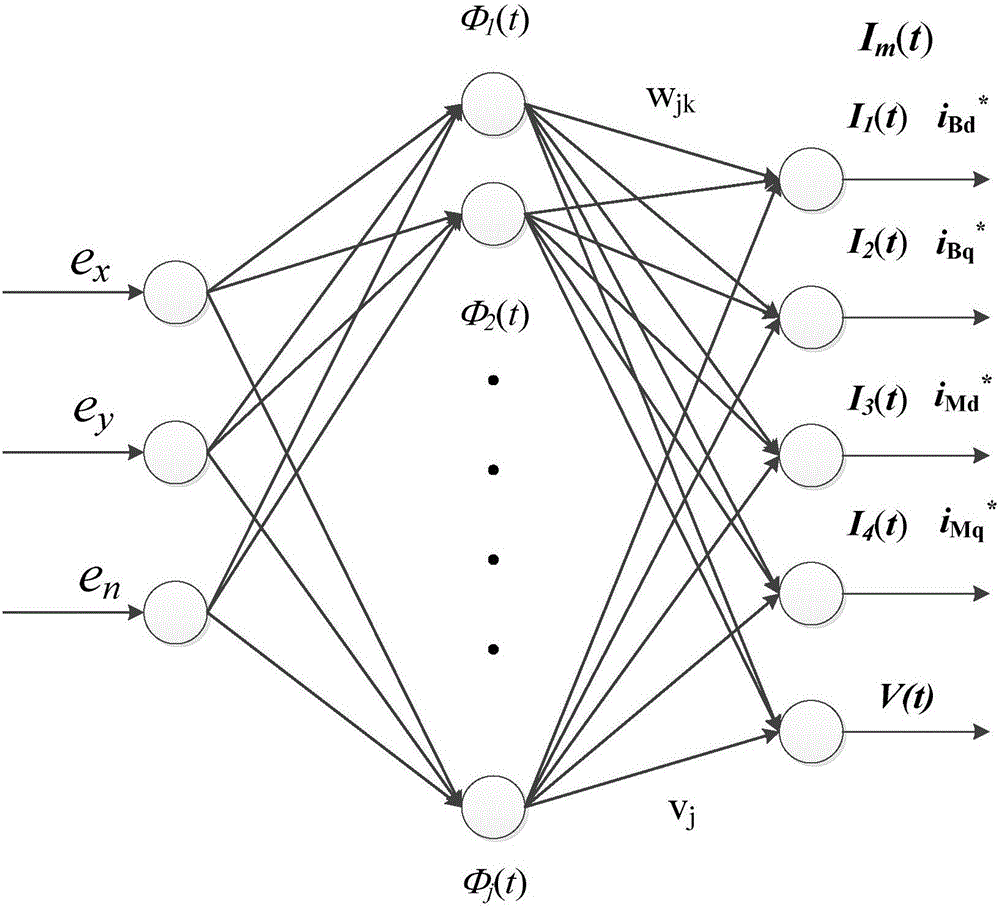
[0025] see figure 1 and figure 2 , the reinforcement learning controller 1 of the bearingless permanent magnet synchronous motor of the present invention is composed of an actuator-evaluator module 2 , a suspension winding current control module 3 and a torque winding current control module 4 . The input ends of the suspension winding current control module 3 and the torque winding current control module 4 are respectively connected to the actuator-evaluator module 2 . The actuator-evaluator module 2 is composed of the actuator neural network 5 , the evaluator neural network 8 , the reinforcement signal module 6 and the temporal difference module 7 . The output ends of the evaluator neural network 8 and the strengthening signal module 6 are connected to the input ends of the instantaneous difference module 7, and the output ends of the instantaneous difference module 7 are respectively connected to the input ends of the actuator neural network 5 and the evaluator neural netw...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More