

Wall-climbing paint spraying robot with elastic anti-explosion wheels
A robot and wheel technology, applied in the direction of wheels, motor vehicles, vehicle parts, etc., can solve the problems of large volume and weight, economic loss of the application party, and hazards of the application party, and achieve the reduction of the overall shape and volume weight, the overall shape and Simplify the volume and weight, eliminate the effect of burning or flash explosion
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0029] The present invention can be explained in more detail by the following examples, and the purpose of disclosing the present invention is intended to protect all changes and improvements within the scope of the present invention, and the present invention is not limited to the following examples:
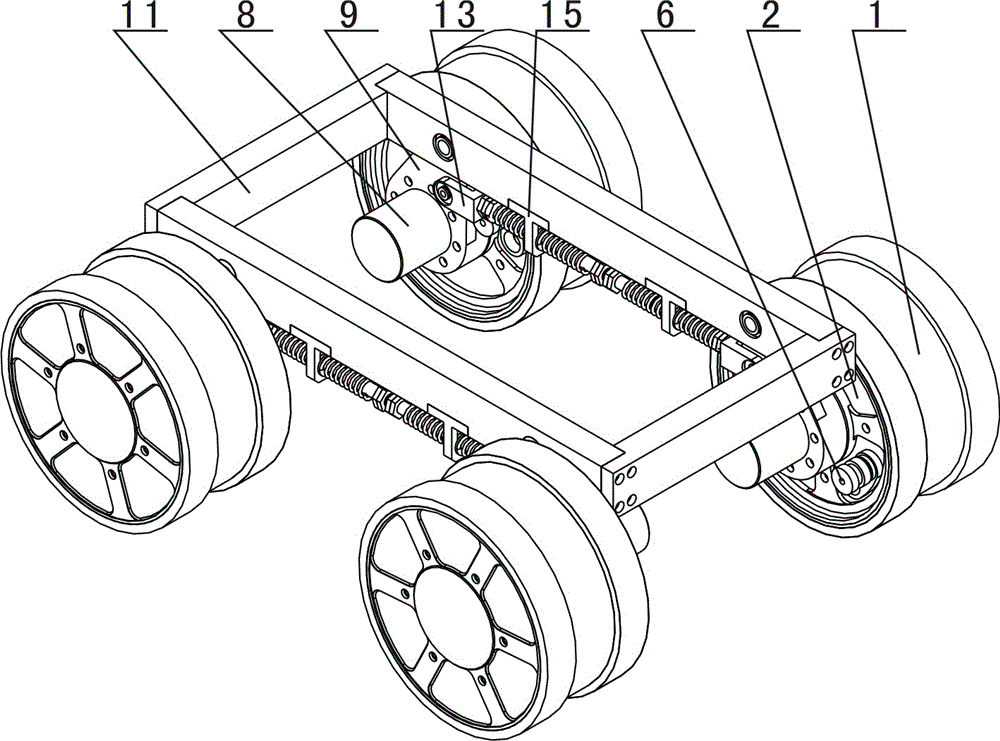
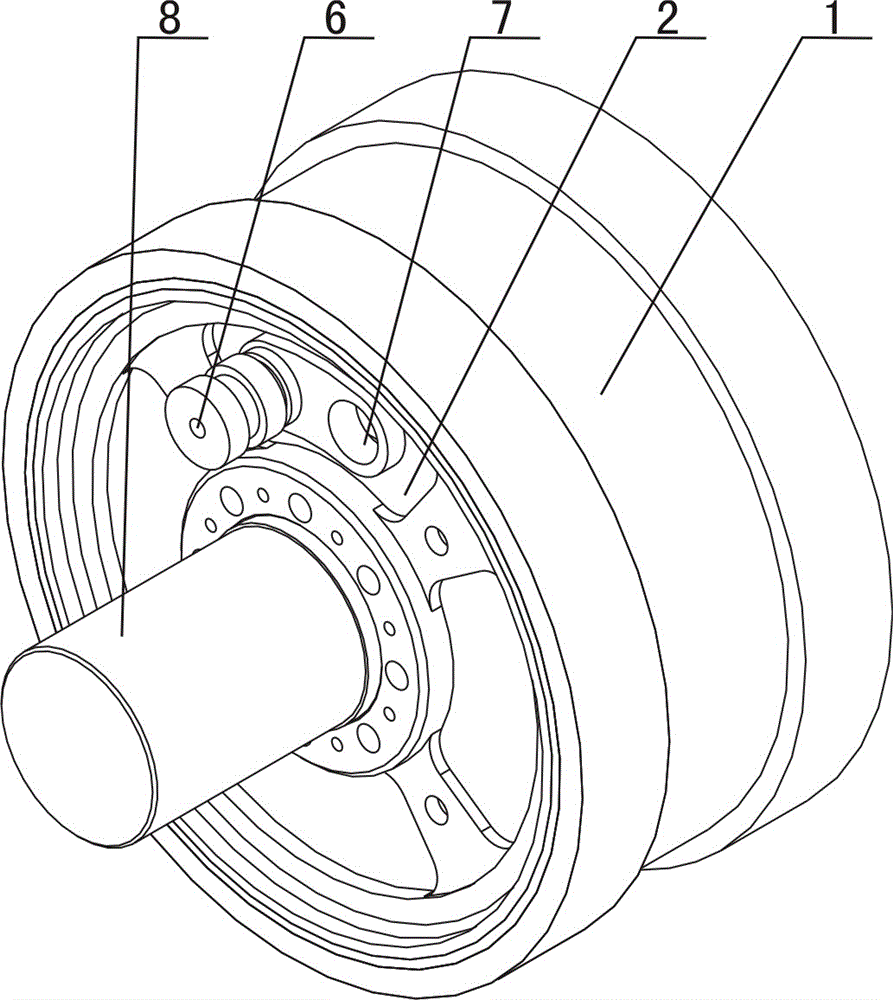
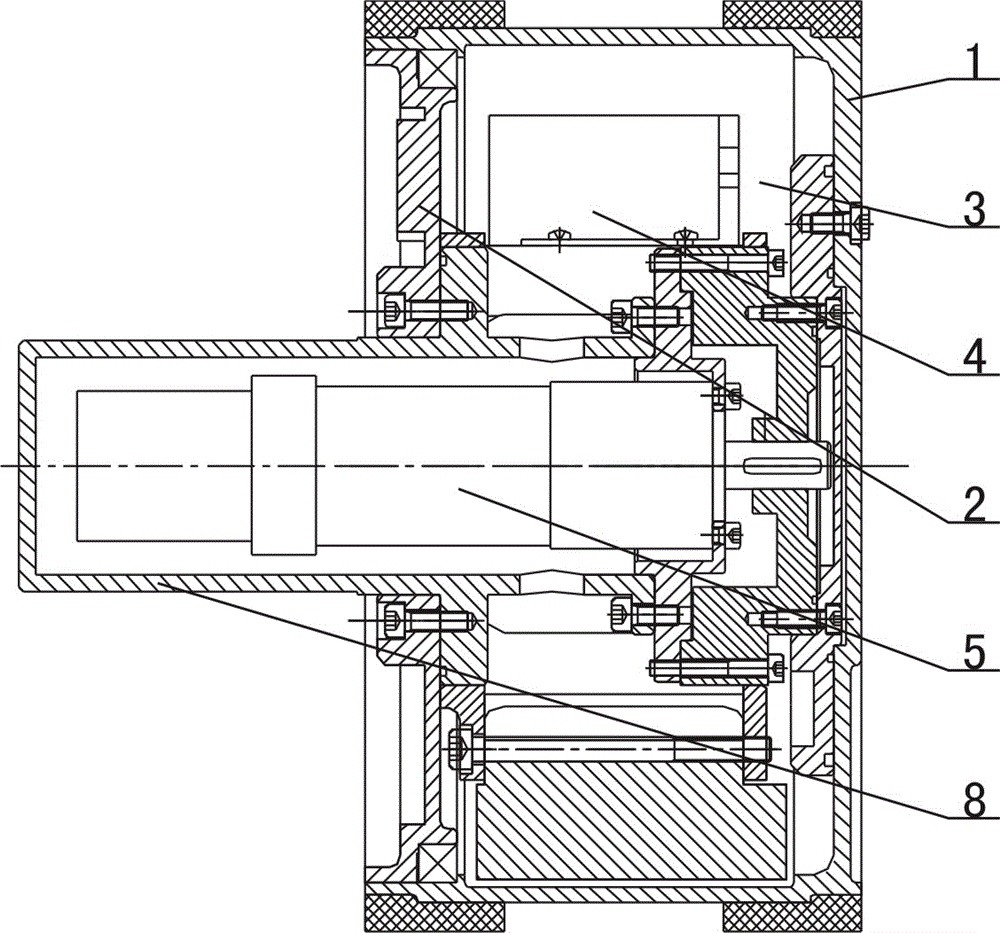
[0030] combined with Figure 1~4 The wall-climbing painting robot with elastic explosion-proof wheels includes explosion-proof wheels and an elastic connection structure; the explosion-proof wheel includes a wheel shell 1, a wheel end cover 2, a wheel drive system, an explosion-proof plug 6 and an inert gas pipe interface 7; The wheel shell 1 and the wheel end cap 2 are in contact with each other to form a cavity 3, and a wheel drive system for driving the explosion-proof wheel is fixedly arranged in the cavity 3, that is, the explosion-proof wheel is installed in the wheel inner cavity 3 The wheel drive system in the drive system drives the rotation; according to the needs, th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More