

Hand-eye calibration method for laser line structured light sensor
A structured light sensor and hand-eye calibration technology, applied in the field of sensor calibration, can solve the problems of lack of calibration results, accurate calibration process is simple and time-saving, parameter distribution has a great influence on the results, and it is difficult to maintain accuracy, etc., to achieve shortened calibration time and high practicality Value, good quality results
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
[0085] The method based on linear constraints is used to calibrate the hand-eye of the robot with the laser line structured light sensor at the end. The robot used in the experiment is the Motoman ssa2000 six-degree-of-freedom robot produced by Yaskawa, and the sensor is the LJ_G200 produced by KEYENCE.
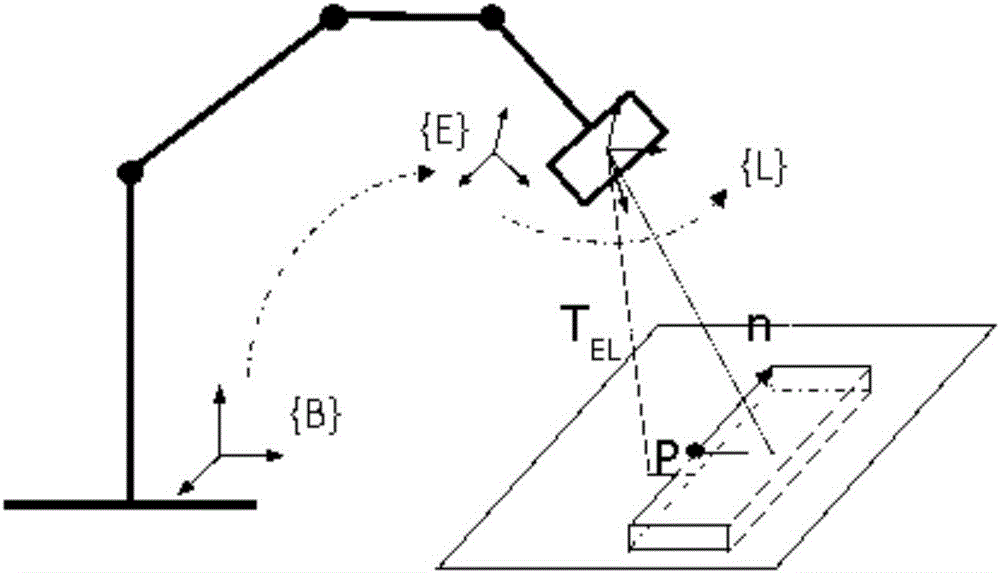
[0086] The schematic diagram of the robot's hand-eye calibration model with the sensor at the end is as follows: figure 1 , the base coordinate system {B} is established on the base of the robot, the end coordinate system {E} is established on the end link, and the sensor coordinate system {L} is established on the sensor, where the origin of the coordinate system {L} is at the laser exit point, and the Z axis The direction coincides with the direction of the bisector of the outgoing laser angle, the X axis is perpendicular to the Z axis on the light plane, and the Y axis is perpendicular to the light plane. The homogeneous transformation matrix of {E} relative to {B} is deno...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More