

Mobile robot navigation method and system
A mobile robot and navigation method technology, applied in the field of mobile robot navigation method and system, can solve the problems that the mobile robot cannot apply the latest navigation algorithm, the robot cannot adapt to different environmental requirements, and the navigation algorithm cannot be changed.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
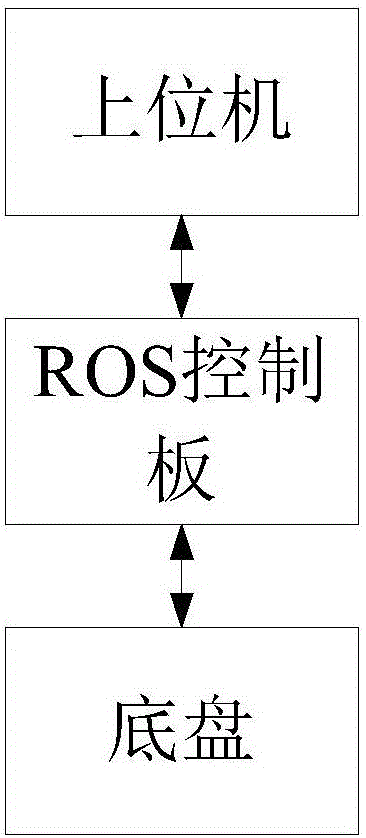
[0019] S100: will The control panel is mounted on the chassis.
[0020] (Raspberry Pi, abbreviated as RPi) is a microcomputer the size of a credit card, and its system is based on Linux. It has all the basic functions of a computer. It is an ARM-based microcomputer motherboard. It uses SD / MicroSD card as a memory hard drive and can be connected to keyboards, mice, network cables and other equipment. It is widely used in various fields. In the present invention, Raspberry Pi 3Model B is selected. Its core is a 64-bit, 4-core ARM v8 chip, which needs to be installed with an operating system, such as the Debian-based Raspbian Jessie operating system.
[0021] Chassis is The chassis is a two-wheel differential drive, and the lidar sensor RPLIDAR is also installed on the chassis It is a 2D 360° laser radar based on the triangular ranging method, which is mainly responsible for collecting the distance and angle information between the mobile robot and surrounding obstacles ...
Embodiment 2
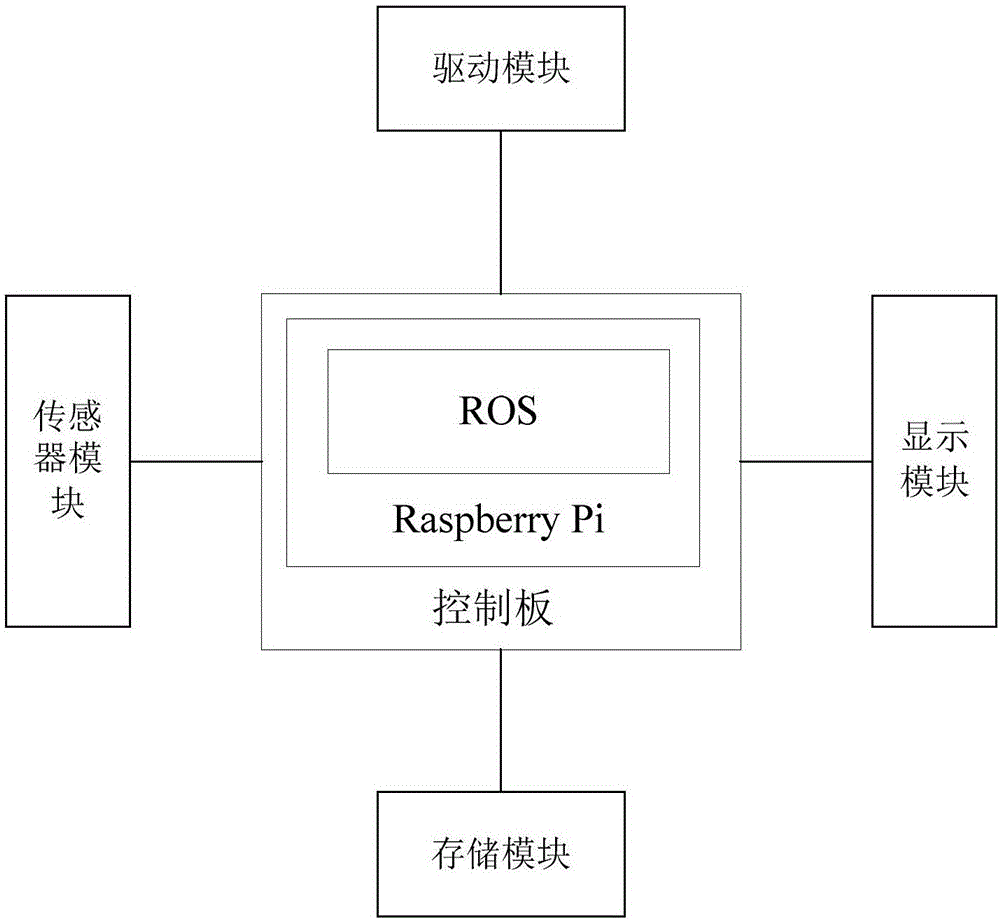
[0033] correspondingly, as Figure 5 As shown, the present invention also discloses a robot navigation system, which includes: The control board is installed on the mobile robot chassis; the first transplant unit is used to transplant the underlying driver files of the ROS system; the second transplant unit is used to transplant the unique driver files of the mobile robot; the compiling unit is used for the navigation algorithm source code to compile.
[0034] Wherein, the chassis is a two-wheel differential drive, and a laser radar sensor is also installed on the chassis to collect distance and angle information between the environment where the mobile robot is located and surrounding obstacles. The control board is respectively connected with the drive module, the sensor module and the storage module. The underlying driver files include USB interface driver files, motherboard driver files, and memory card driver files.
[0035] It also includes a storage unit, which is...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More