

Ship fin stabilizer sliding mode control method based on disturbance observer
A technology of disturbance observer and control method, applied in the direction of adaptive control, general control system, control/adjustment system, etc., can solve problems such as chattering, achieve reduced wear, strong robustness, and good anti-rolling effect Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
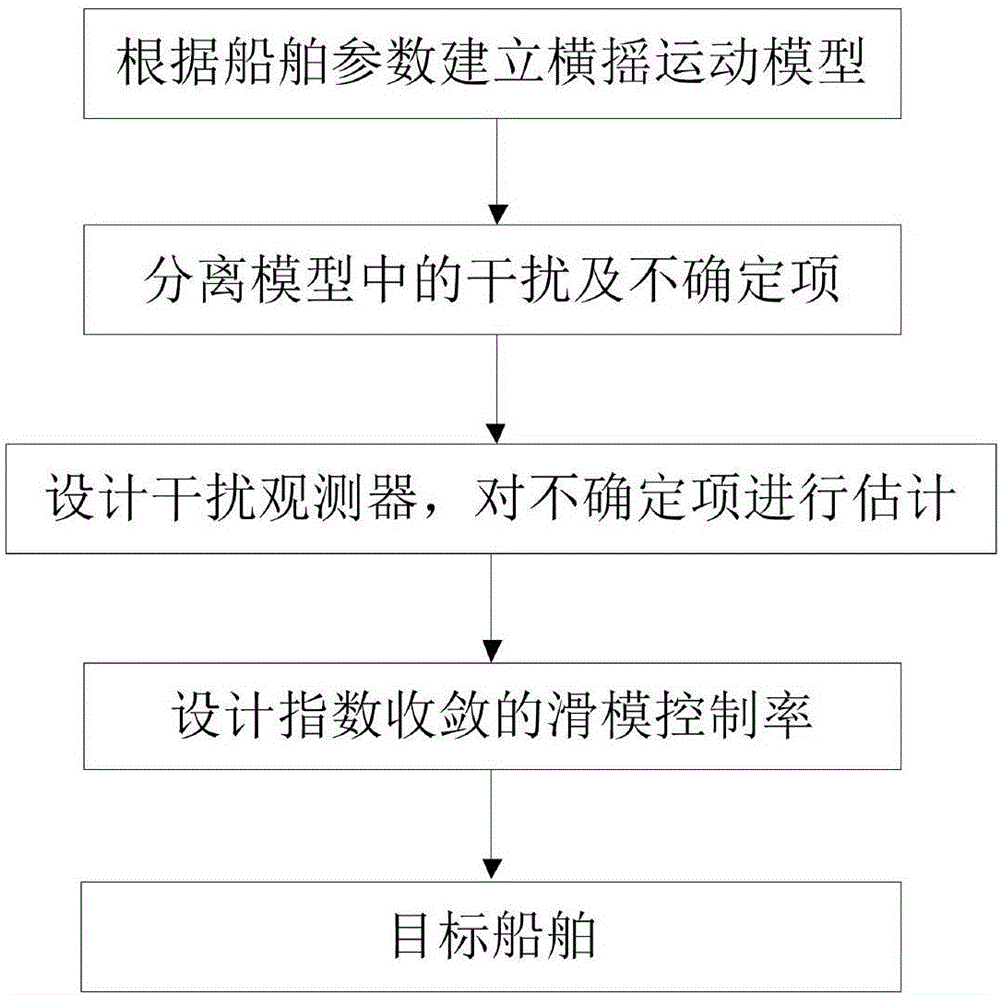
[0060] figure 1 is the flow chart of the fin stabilizer sliding mode control method. Such as figure 1 As shown, the ship fin stabilizer sliding mode control method based on the disturbance observer of the present invention specifically includes the following steps:
[0061] Step 1, according to the ship parameters, determine the ship roll dynamic equation as follows;
[0062]
[0063] Among them, φ is the rolling angle of the ship; M w is the wave disturbance moment, approximately, the wave disturbance moment M w Proportional to the wave inclination α e , namely M w = cα e , c is the moment coefficient; M c is the ship roll control moment generated by the fin stabilizer, approximately, the ship roll control moment M c and fin stabilizer angle α f linear relationship, that is, M c = bα f , b is the moment coefficient; (I+ΔI) is the sum of the rolling hull inertia moment and additional inertia moment; is the nonlinear damping coefficient model; C(φ) is the hull r...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More