

Method and system for obstacle avoidance of robot
A robot and obstacle technology, applied in the field of robot obstacle avoidance methods and systems, can solve the problems of large quantity and increased design complexity, and achieve the effect of improving service life, improving accuracy, and simple and precise autonomous obstacle avoidance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment approach 1
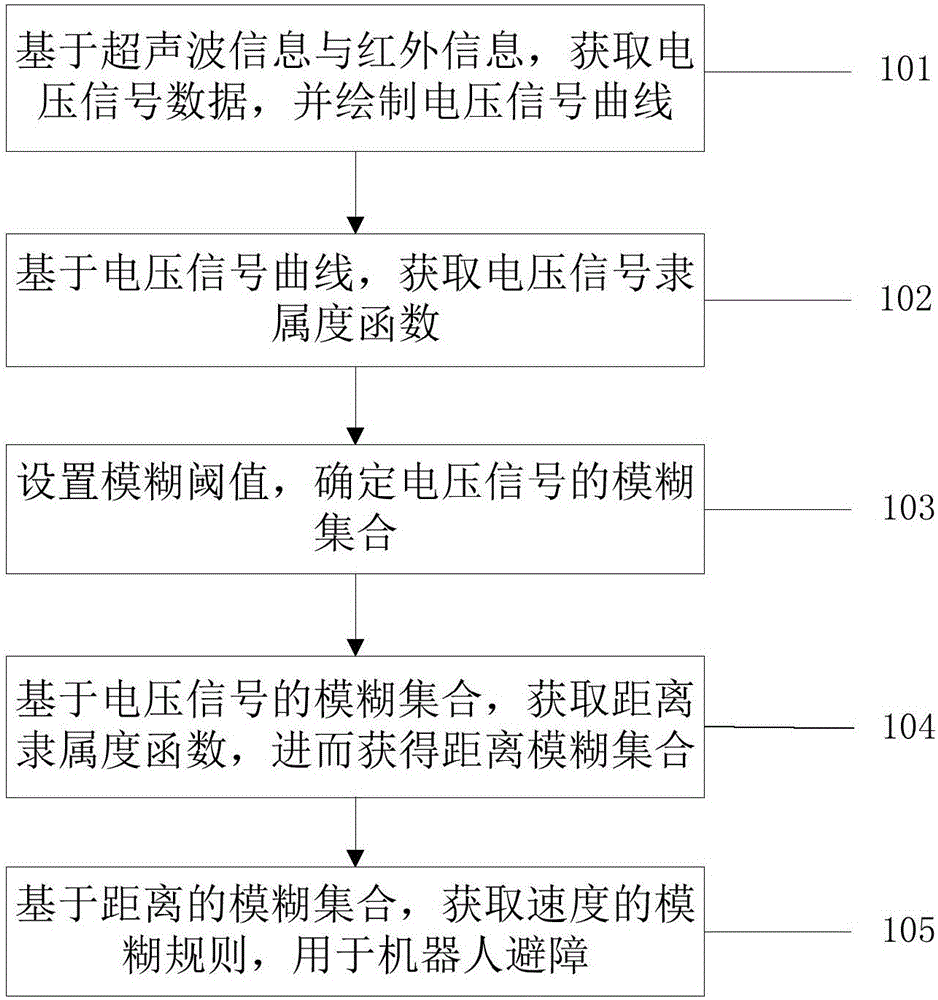
[0027] figure 1 A flowchart showing the steps of the robot obstacle avoidance method according to the present invention.
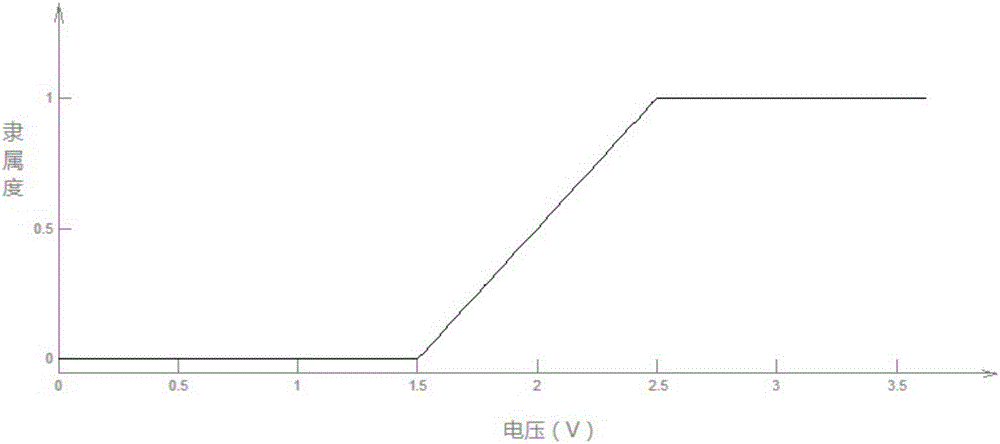
[0028] In this embodiment, the robot obstacle avoidance method according to the present invention may include: step 101, based on ultrasonic information and infrared information, obtain voltage signal data, and draw a voltage signal curve; step 102, based on the voltage signal curve, obtain voltage signal belonging degree function; step 103, setting fuzzy threshold, determining the fuzzy set of voltage signal; step 104, based on the fuzzy set of voltage signal, obtaining the membership function of distance, and then obtaining the fuzzy set of distance; and step 105, based on the fuzzy set of distance , to obtain the fuzzy rules of velocity, which is used for robot obstacle avoidance.
[0029] This implementation mode realizes autonomous obstacle avoidance of the robot more simply and accurately through multiple fuzzy logic processing, and improves the ser...
Embodiment approach 2
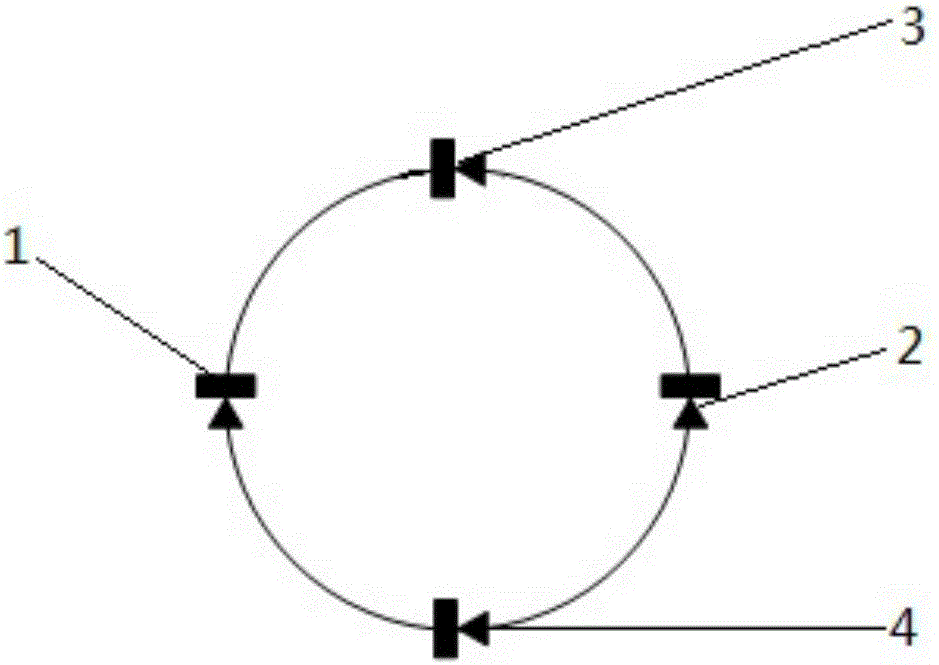
[0062] According to an embodiment of the present invention, a robot obstacle avoidance system is provided, and the system may include: a sensing unit for acquiring ultrasonic information and infrared information, and further acquiring voltage signal data; a calculation unit for drawing a voltage signal curve , obtain the membership function of the voltage signal, and then determine the fuzzy set of the voltage signal; based on the fuzzy set of the voltage signal, obtain the membership function of the distance, and then obtain the fuzzy set of the distance; based on the fuzzy set of the distance, obtain the fuzzy rule of the speed; control The processing unit is used to set the fuzzy threshold and the speed-based fuzzy rules to control the robot to avoid obstacles.
[0063] This embodiment adopts a sensing system combining infrared sensing and ultrasonic sensing to improve the accuracy of data; through multiple fuzzy logic processing, it is simpler and more accurate to realize t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More