

Checkerboard corner point detection method and device
A grid corner point and point detection technology is applied in the field of checkerboard grid corner point detection method and device, which can solve the problems of poor applicability of calibration environment and high cost of setting up calibration environment, so as to improve robustness, improve calibration accuracy, and improve The effect of detection accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
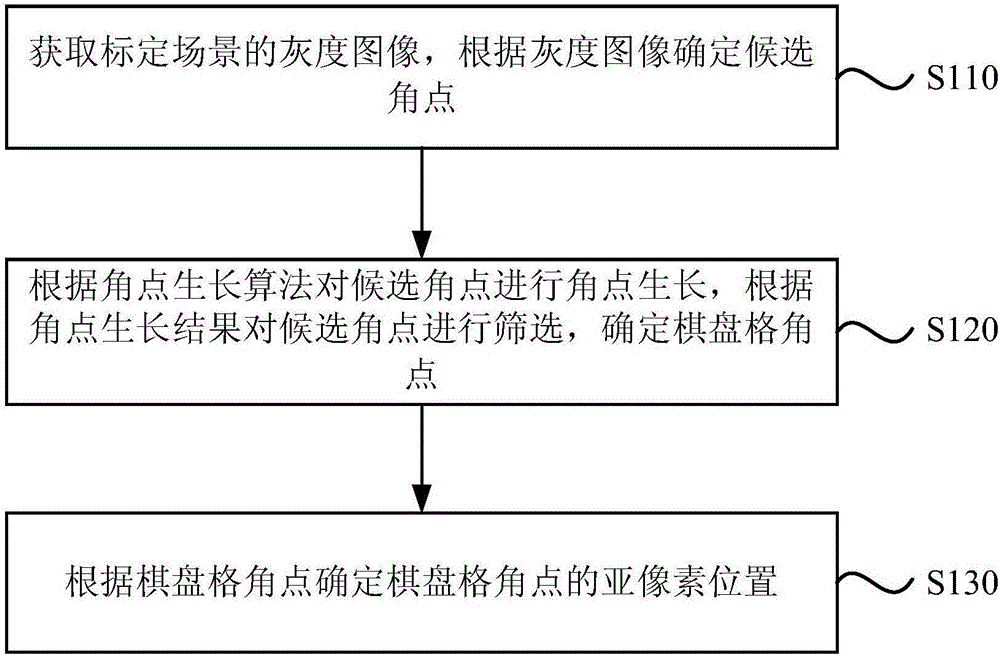
[0061] Figure 1AIt is a flow chart of the checkerboard corner detection method provided by Embodiment 1 of the present invention. This embodiment is applicable to the detection of checkerboard corners in any field of view background. device, the device may be implemented in the form of software and / or hardware, and the method specifically includes:
[0062] S110. Acquire a grayscale image of the calibration scene, and determine candidate corner points according to the grayscale image.
[0063] Wherein, the calibration scene refers to the background where the checkerboard is located. Exemplarily, the calibration scene may be a table with a checkerboard, a book with a checkerboard, or a scene including other background objects with a checkerboard. Take image capture of the calibration scene. If the acquired image is a color image, you need to convert the color image to a grayscale image.
[0064] Pixels of a grayscale image have 256 grayscales from black to white, wherein a co...
Embodiment 2
[0094] Figure 2A It is a flow chart of the checkerboard corner detection method provided in Embodiment 2 of the present invention. On the basis of the above embodiments, a method for growing corners of candidate corners according to the corner growth algorithm is further provided. Correspondingly, the method Specifically include:
[0095] S210. Acquire a grayscale image of the calibration scene, and determine candidate corner points according to the grayscale image.
[0096] S220. Determine the sub-pixel edge direction of the candidate corner point.
[0097] Wherein, an edge refers to a collection of pixel points whose pixel gray value changes sharply only in one direction, for example, in a checkerboard, it may be a pixel point whose pixel gray value changes sharply only in the horizontal or vertical direction The set of , the edge direction refers to the direction perpendicular to the edge gray gradient. Wherein, the sub-pixel edge direction refers to the sub-pixel edge ...
Embodiment 3
[0114] Fig. 3 is a flow chart of the checkerboard corner detection method provided by the third embodiment of the present invention. On the basis of the above embodiment, a method for growing the corners of the initial frame through the prediction error algorithm is further provided. Correspondingly, the The methods specifically include:
[0115] S310. Acquire a grayscale image of the calibration scene, and determine candidate corner points according to the grayscale image.
[0116] S320. Determine the sub-pixel edge direction of the candidate corner point.
[0117] S330. Perform corner growth on corner points according to the sub-pixel edge direction and checkerboard size, and determine an initial frame for candidate corner growth.
[0118] S340. Determine a line distance between known corner points having a common edge among the known corner points.
[0119] Wherein, if there are two known corner points on a certain edge, the edge is determined as the common edge of the ab...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More