

Robot for cleaning particle materials
A technology for cleaning robots and granular materials, applied in the field of food machinery, can solve the problems of high labor intensity, low work efficiency, and a lot of human labor, and achieve the effect of flexible working methods and high degree of automation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
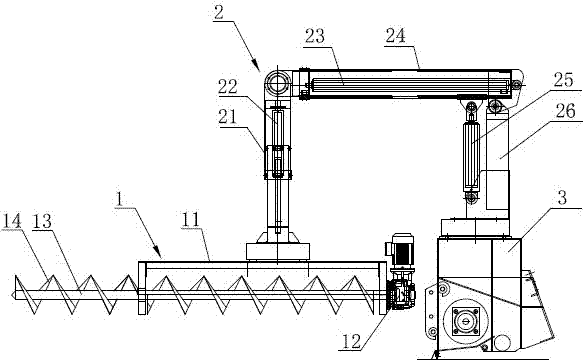
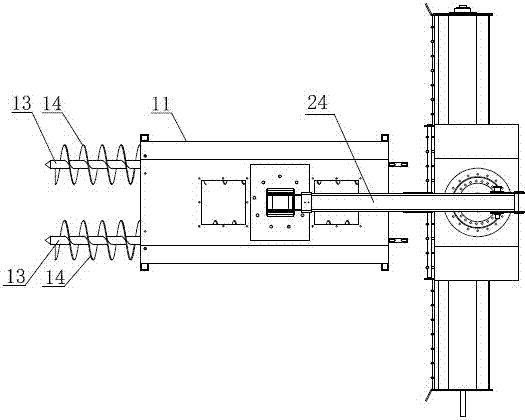
[0022] Such as figure 1 , figure 2 As shown, the granular material cleaning robot includes a manipulator 1, an arm 2 and a base 3. The manipulator 1 includes a cuboid shell 11 with an open bottom, and two core rods 13 are arranged in parallel inside the shell 11, and two core rods 13 are provided with spiral directions. Opposite helical blades 14 . The length of the core rod 13 is longer than the length of the shell 11, the end is driven by the drive motor 12, and the front end part away from the base 3 extends out of the shell 11, and the extension part can be screwed into the pile of hardened and agglomerated materials during work, playing a role similar to The function of the drill bit to break the hardened area of the material. The length of the core rod 13 extending out of the shell 11 is 0.5 times the length of the shell 11 , and in other embodiments the length of the core rod 13 extending out of the shell 11 may also be 0.1-0.8 times the length of the shell 11 .
...
Embodiment 2
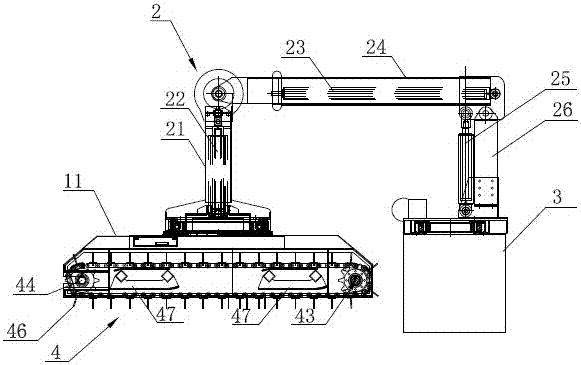
[0026] Such as image 3 , Figure 4 As shown, in this embodiment, the manipulator 1 is replaced by a scraper conveyor 4. The scraper conveyor 4 includes a cuboid shell 11, and two parallel sprocket shafts 42 are longitudinally arranged at both ends of the shell 11. On the two sprocket shafts 42 Drive sprocket 43 and driven sprocket 44 are arranged respectively, and two parallel chains 45 are perpendicular to sprocket shaft 42 and are enclosed within on drive sprocket 43 and driven sprocket 44, are provided with some vertical sprockets on two chains 45. scraper 46. One end of the drive sprocket 43 on the casing 11 is provided with a transmission mechanism 41 for driving the drive sprocket 43 to rotate. Two brackets 47 are also arranged between the driving sprocket 43 and the driven sprocket 44 in the housing 11, and the brackets 47 are used to support the chain 45 and connect the housing.
[0027] During actual work, start the transmission mechanism 41 of the scraper conveyo...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More