

Distributed type INS/UWB tightly-coupled navigation system and method
A tightly combined and distributed technology, applied in navigation, navigation through velocity/acceleration measurement, mapping and navigation, etc., can solve problems such as poor system fault tolerance, disadvantageous integrated navigation technology accuracy, and reduced application scope of integrated navigation models. To achieve the effect of improving accuracy and robustness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0056] Embodiment 1: as figure 1 As shown, a distributed INS / UWB tight integrated navigation system includes an inertial navigation device, a pseudo-range detection unit, a wireless data transmission system and a data processing system;
[0057] The inertial navigation device is used to measure the navigation information of pedestrians, and the navigation information includes position, speed and attitude information; the pseudo-range detection unit is used to obtain the pseudo-range information: the wireless data transmission system is connected with the inertial navigation device and the pseudo-range detection unit, It is used to transfer the data collected by the inertial navigation device and the pseudo-range detection unit to the data processing system through wireless transmission, and transfer the control command sent by the data processing system to the inertial navigation device; the data processing system: adopts distributed The data fusion estimation unit is used for...
Embodiment 2
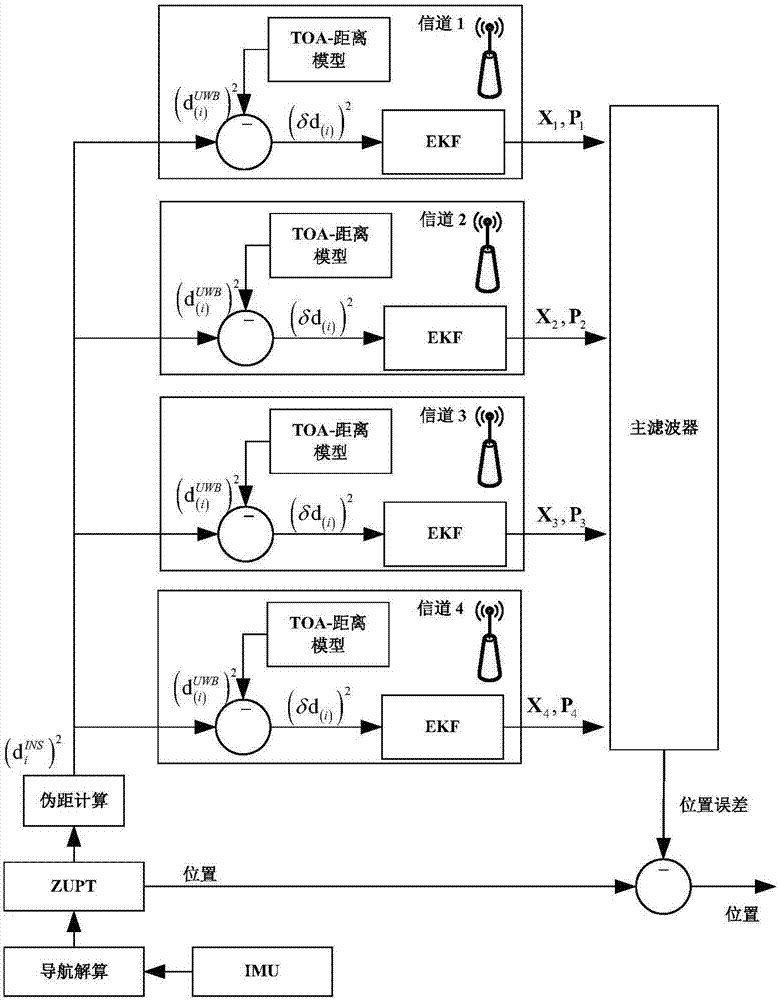
[0063] Embodiment 2: as figure 2 As shown, a distributed INS / UWB tight integrated navigation method adopts the following steps:
[0064] (1) Using the error vector of the inertial navigation device and the position information of each UWB reference node as the state quantity, and the position information and pseudo-range information of the target pedestrian collected by the inertial navigation device as the system observations, construct the INS / UWB tight integrated navigation model ;
[0065] (2) According to the INS / UWB tight integrated navigation model, perform data fusion estimation on the navigation information and pseudorange information of the target pedestrian in each wireless communication channel, and obtain the navigation information of the current wireless communication channel and the target pedestrian at the current moment best estimate;
[0066] (3) Perform data fusion estimation on the optimal estimates obtained in each wireless communication channel to obta...
Embodiment 3
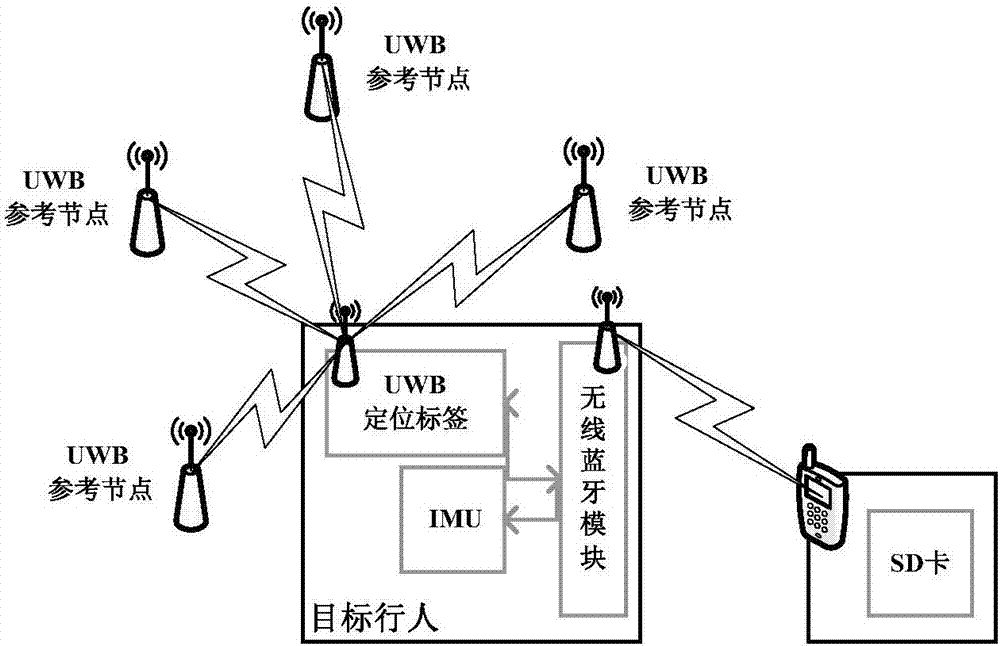
[0069] Embodiment 3: A distributed INS / UWB tight integrated navigation, including: an inertial navigation device IMU, a UWB positioning tag, a UWB reference node and a data processing system;
[0070] The inertial navigation device INS and the UWB positioning tag are respectively set on the pedestrian's hat, the UWB reference node is set at any position, and the inertial navigation device INS and the UWB positioning tag are respectively connected to the data processing system.
[0071] Among them, the inertial navigation device INS: used to measure the navigation information such as the position, speed and attitude of pedestrians;
[0072] UWB positioning tag: used to measure the distance information between the UWB positioning tag and the reference node, that is, pseudo-range information;
[0073] UWB reference node: placed in a known position in advance, easy to measure and locate the distance between tags;
[0074] Data processing system: used for data fusion of collected ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More