

Unmanned aerial vehicle tracking method based on embedded platform
An embedded, unmanned aerial vehicle technology, applied in the field of image processing, can solve the problems of not being able to effectively judge whether the target vehicle is lost or not realize automatic tracking, and achieve the goal of not reducing the detection accuracy, reducing the transmission bandwidth, and improving the robustness Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
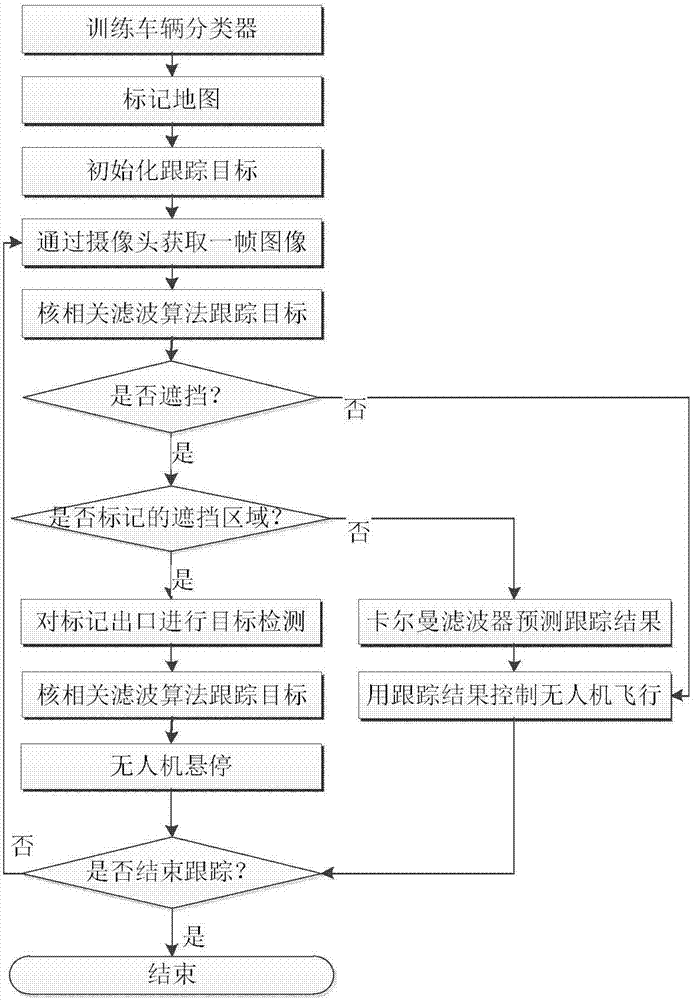
[0030] The present invention will be described in further detail below in conjunction with the accompanying drawings.
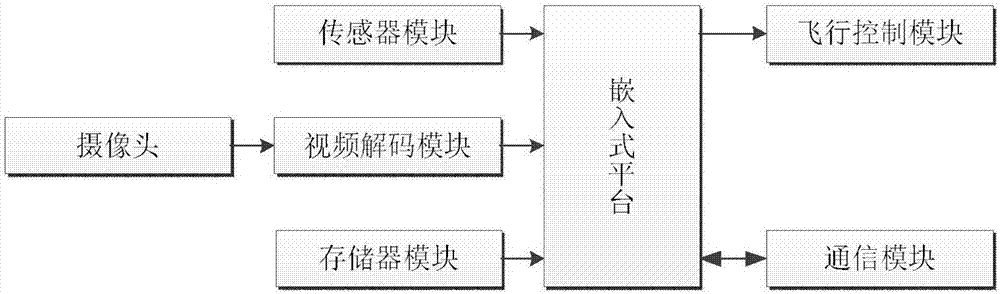
[0031] refer to figure 2 , the tracking system used in the present invention includes an embedded platform, a camera, a video decoding module, a sensor module, a memory module, a flight control module and a communication module. Among them, the embedded platform is responsible for communicating with other modules and completing the processing of target autonomous tracking; the sensor module is equipped with a barometer and a global positioning system module, which is used to obtain the flying height of the drone and the GPS information of the global positioning system; the camera module is used for Collect image frames and send the images to the video decoding module for decoding; the video decoding module completes the decoding of the code stream and transmits the decoded video frames to the embedded platform; the communication module communicates with the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More