Open-loop control starting method and device for permanent magnet synchronous motor
A permanent magnet synchronous motor and open-loop control technology, which is applied in the control of electromechanical transmission, motor control, motor generator control, etc., can solve the problems of hardware measurement accuracy dependence, reduced system robustness, and low start-up success rate. Achieve the effect of eliminating hardware detection circuit, preventing huge inrush current, and low cost
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0066] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments. It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention.
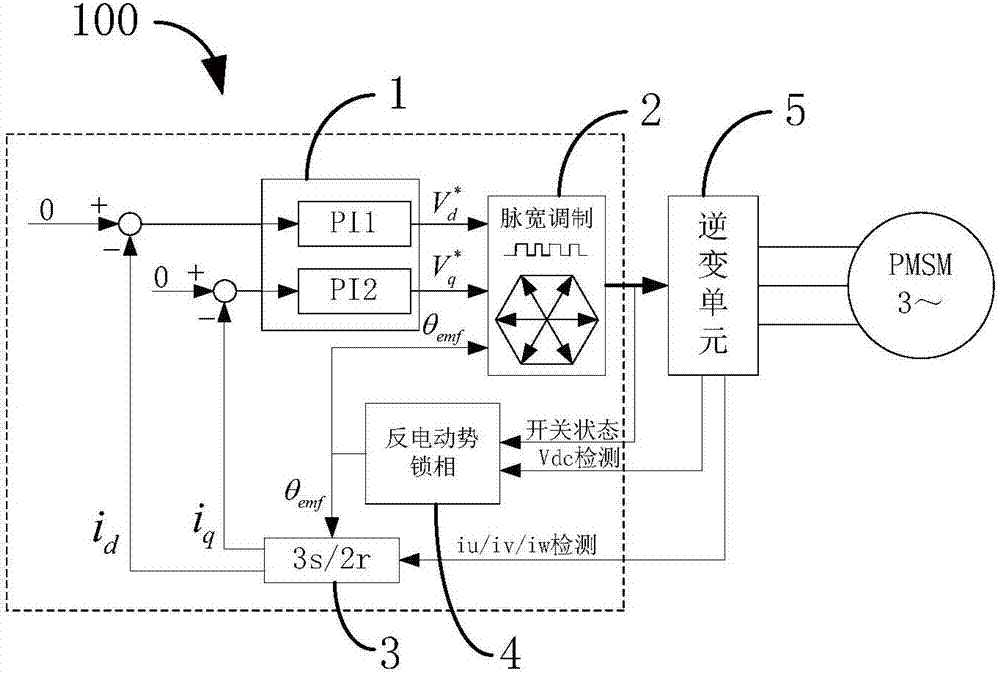
[0067] The invention provides an open-loop control startup method and device for a permanent magnet synchronous motor. Open-loop control starts the huge inrush current generated by the motor. This low-cost open-loop control starting method and system does not require a voltage detection device, and the hardware detection circuit of the existing method is omitted. The present application provides a low-cost open-loop control startup method and device that does not require a counter electromotive force detection device.
[0068] see figure 1 , figure 1 A structural block diagram of an open-loop co...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More