

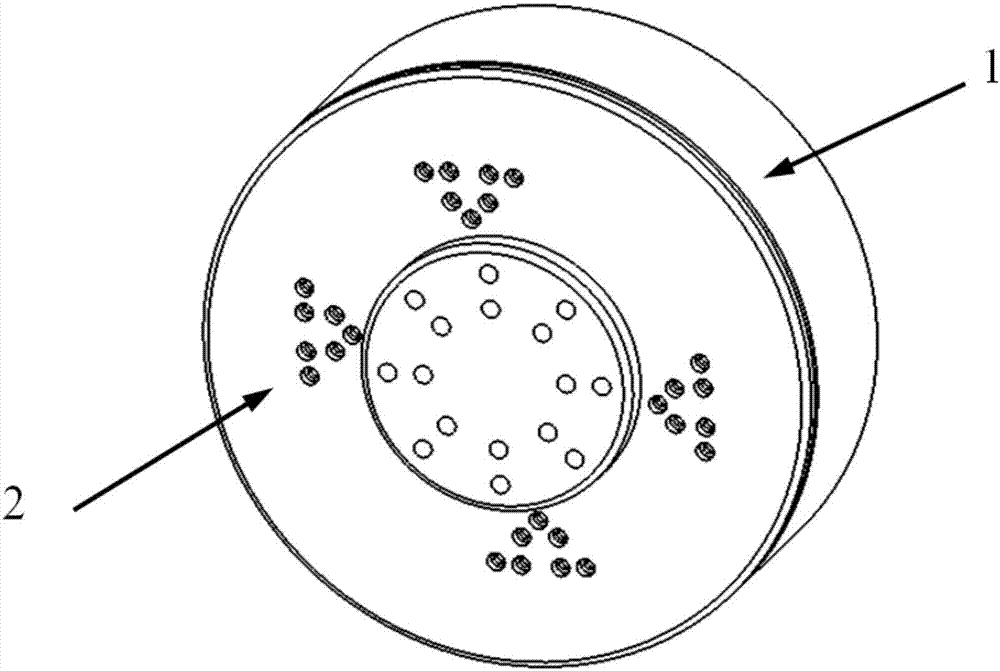
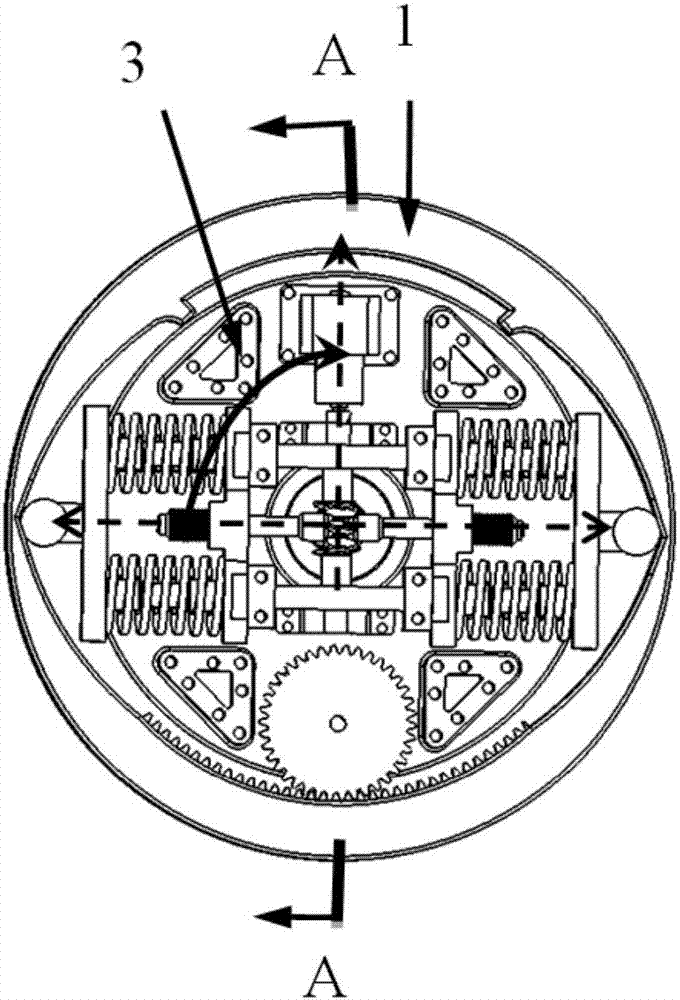
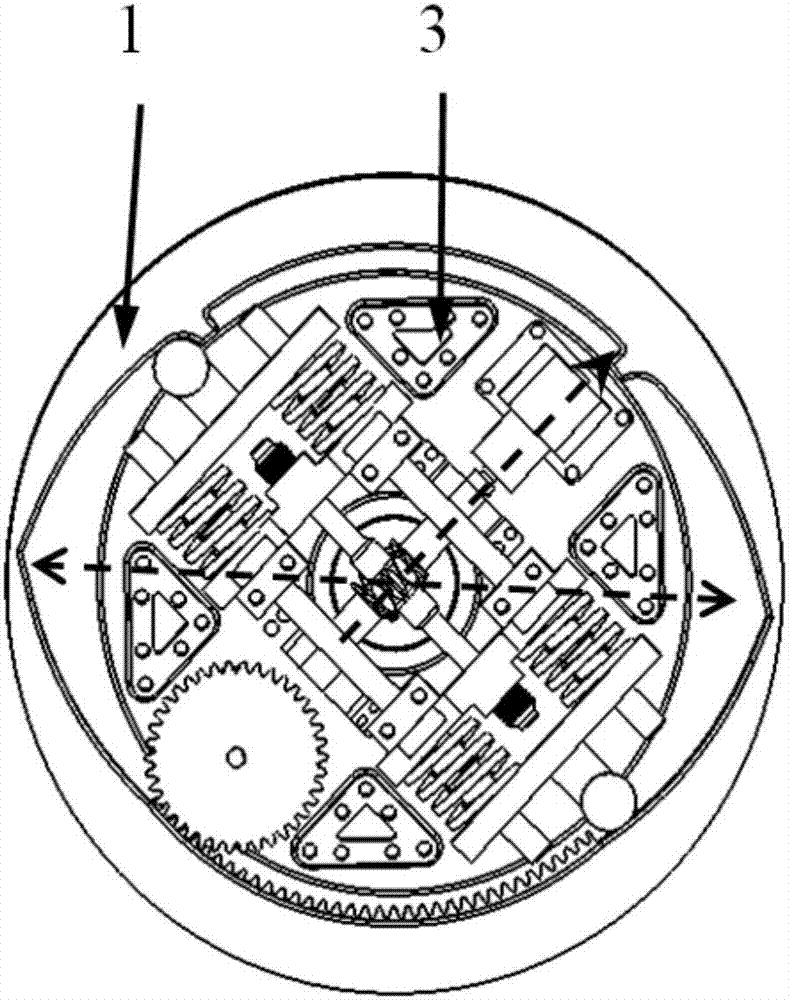
Compact variable-stiffness rotary flexible joint
A flexible joint and variable stiffness technology, applied in the field of robotics, can solve problems such as low safety, high manufacturing and installation accuracy, and large energy consumption, and achieve the effects of improved motion stability, high safety and reliability, and compact structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0027] Specific examples of the present invention are given below. The specific embodiments are only used to further describe the present invention in detail, and do not limit the protection scope of the claims of the present application.
[0028] The invention provides a compact variable stiffness rotating flexible joint (see Figure 1-8, referred to as joint), including joint drive plate 1, joint output plate 2, joint passive inner plate 3, thrust needle roller bearing 4, angular contact ball bearing 5, shaft circlip 6, first cam 7, first passive variable stiffness Adjustment seat 8, first group of compression springs 9, optical axis 10, first variable stiffness adjustment seat 11, optical axis support seat 12, turbine screw structure 13, second variable stiffness adjustment seat 14, second group of compression springs 15, The second passive variable stiffness adjustment seat 16, the second cam 17, the cylindrical gear 18, the worm 19, the absolute encoder 20, the encoder s...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More