Variable-rigidity flexible drive for lower-limb ankle joint exoskeleton robot
An exoskeleton robot and flexible driver technology, applied in the field of robotics, can solve the problem of single driving mode
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
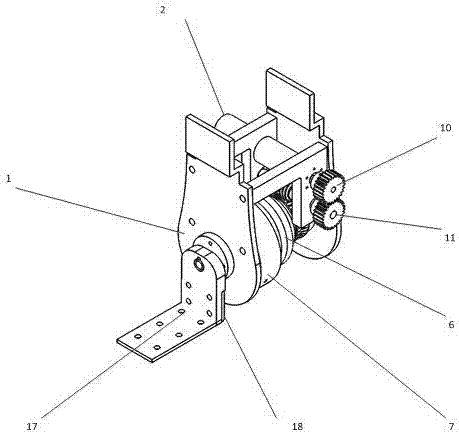
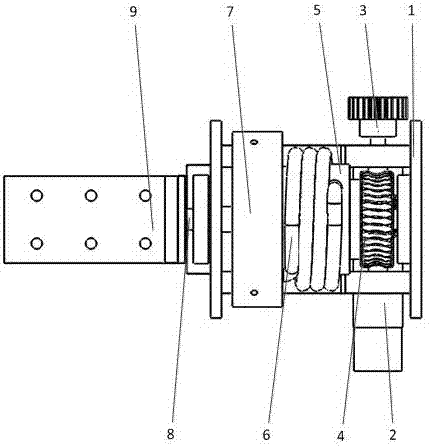
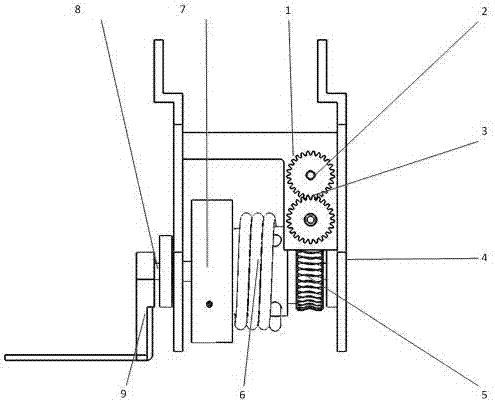
[0021] The present invention is a variable stiffness flexible driver for the lower limb ankle joint exoskeleton robot. It is a combination of active and passive drivers. The driving motor 2 is connected with the worm gear mechanism 4 through the gear transmission mechanism 3, and the motion is transmitted to the torsion spring driving end 5 by the worm gear mechanism 4, and then the compression torsion spring 6 drives the turntable shifting fork mechanism 7 to move; the active force of the variable stiffness flexible driver The drive motor 2 is only driven at a timely stage during walking, that is, the motor is only driven at the stage when the ankle needs power assistance. The multi-mode driver makes full use of the advantages of energy storage and effective energy release of the energy storage device to make the ankle joint of the lower limbs Skeletal robots have the characteristics of low power consumption.
[0022] figure 1 , figure 2 , image 3 Among them, the variabl...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More