

Dynamic automatic drive lane-changing trajectory planning method based on real-time environment information
An automatic driving and real-time environment technology, applied in the direction of control devices, etc., can solve the problems of not considering the real-time response of vehicles changing lanes, inconsistent driving environment, model failure, etc., to achieve high comfort and efficiency experience, high service level, and guarantee safety effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
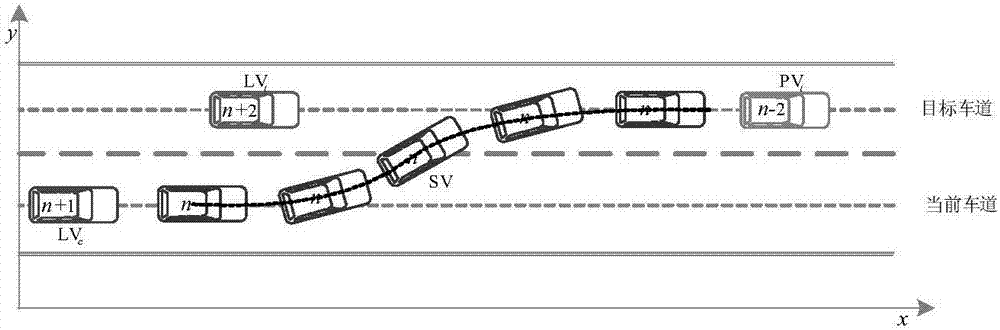
[0040] A dynamic automatic driving lane change trajectory planning method based on real-time environmental information, comprising the following content:
[0041] 1. Trajectory planning module
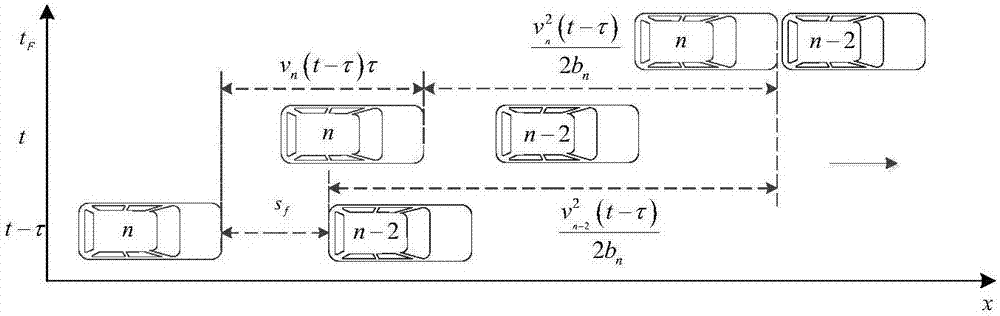
[0042] The trajectory planning module includes four parts: optimal trajectory algorithm, anti-rollover algorithm, collision avoidance algorithm, and trajectory decision-making. Among them, the optimal trajectory algorithm is used to calculate the optimal trajectory under the condition of given speed and comfort weight parameters, the anti-rollover algorithm is used to determine the left boundary of the trajectory cluster without rollover, and the collision avoidance algorithm is used to determine the safety interval of the trajectory end point , and in trajectory decision-making, the optimal trajectory satisfies the safety constraints by adjusting the speed and comfort weight parameters.
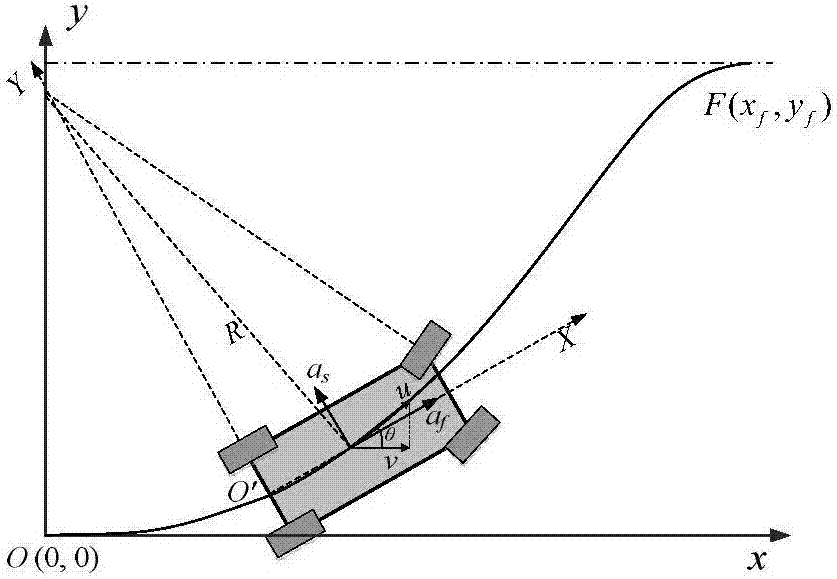
[0043] (1) Optimal trajectory algorithm
[0044] The self-driving vehicle performs trajectory p...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More