

Multiple-degree-of-freedom controlled variable design-based output tracking robustness forecast control method
A technology of predictive control and control quantity, which is applied in the field of output tracking robust predictive control based on multi-degree-of-freedom control quantity design, and can solve problems such as not taking into account external disturbances of the system
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
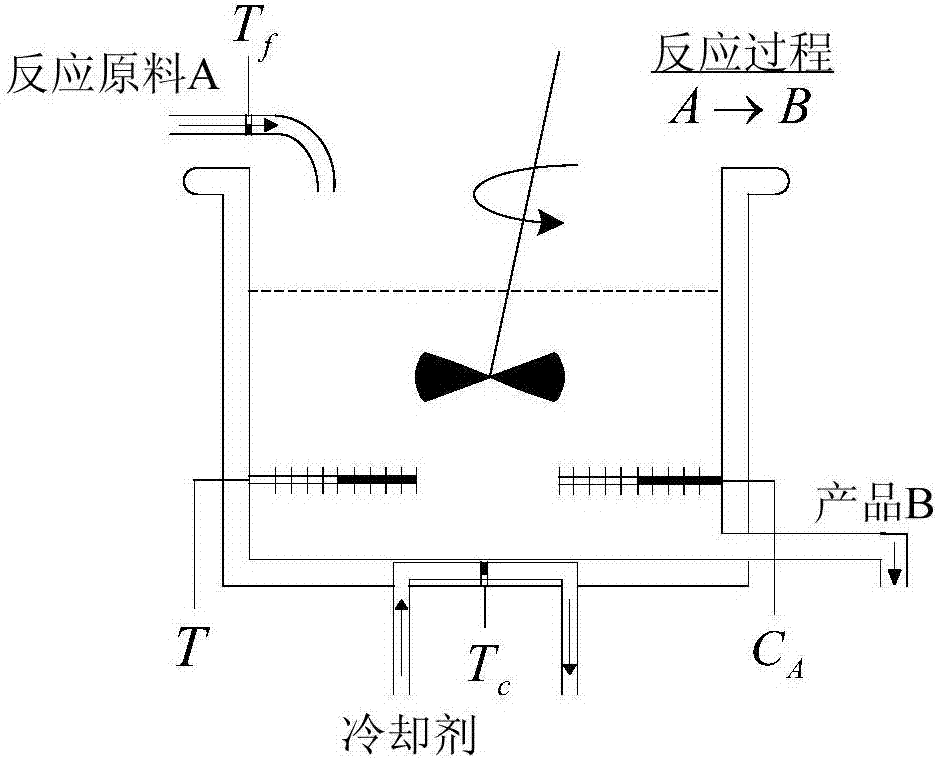
[0060] The concrete implementation schematic diagram that the present invention is applied to CSTR (continuously stirred reactor) system is as figure 1 shown. In this specific implementation, an exothermic and irreversible reaction occurs in the CSTR system. The reaction raw material is A and the product is B. The reaction raw material A flows into the reactor at a certain flow rate, and the generated reaction material flows out of the reactor at the same flow rate. The relevant parameters in the CSTR system as shown in Figure 1 are: the reaction temperature in the reactor is T, and the coolant temperature is T c , the feed concentration of reaction raw material A is C Af =1mol / L, feed flow is Q f =100L / min, feed temperature is T f =350K, the reactor volume is V=100L, and the specific heat is C p =0.25J / g·K, the concentration of A after the reaction is C A , the product of the heat transfer coefficient and the reactor surface area is UA h =5.8×10 4 J / (mingk). In this e...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More