

Position servo control system based on stepping drive and control method thereof
A stepping drive and drive technology, applied in the direction of position/direction control, control/regulation system, non-electric variable control, etc., can solve the problems of system complexity, increasing hardware, and increasing the cost of position control system
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0044] The present invention will be further described below in conjunction with the accompanying drawings.
[0045] Such as figure 1 As shown, a position follow-up control system based on stepper drive, including a controller, a stepper motor driver, a stepper motor, a reducer and a follow-up turntable; the controller receives the position given by the host computer, and completes the turntable position control, and the frequency command (pulse output signal and direction output signal) is transmitted to the stepper motor driver through the connecting cable with the stepper motor driver to complete the control of the stepper motor; the output shaft of the stepper motor and the reducer The input rotating shaft is connected to drive the reducer to rotate; the output shaft of the reducer is connected to the rotating shaft of the follow-up turntable to drive the follow-up turntable to rotate.
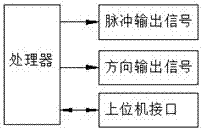
[0046] Such as figure 2 As shown, the controller includes a processor (the processo...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More