

Virtual synchronous power generation method and system based on inverter
A technology of virtual synchronous power generation and virtual synchronous motor, which is applied in the field of electric power, can solve problems such as difficult synchronization of grid-connected inverters and micro-grids, and achieve the effects of closed-loop control, stable power output, and improved stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
no. 1 example
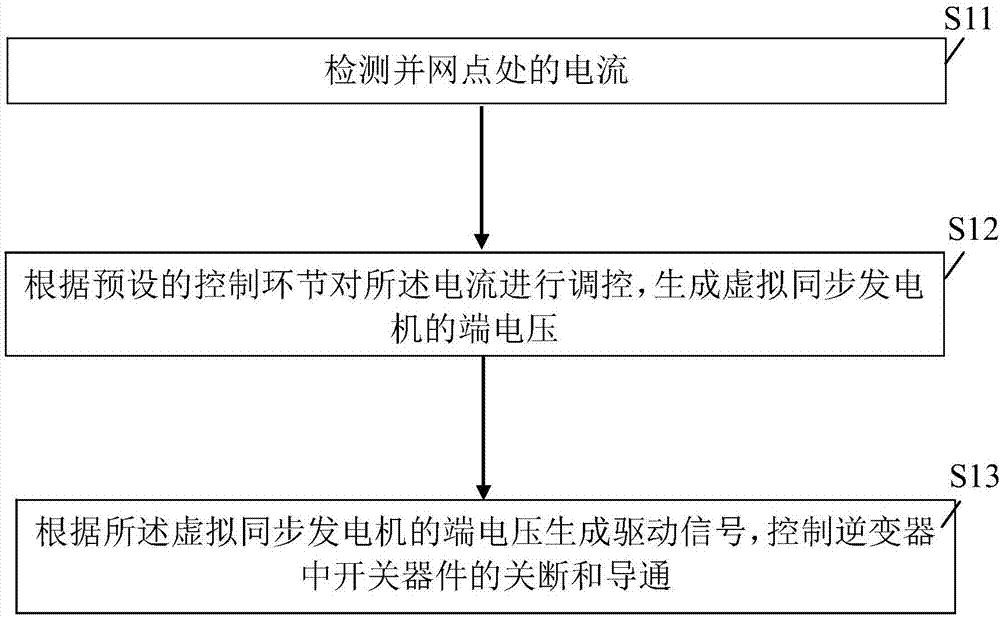
[0048] See figure 1 , is the flow chart of the first embodiment of the inverter-based synchronous power generation method provided by the present invention, and the method includes:
[0049] S11. Detect the current at the grid-connected point. Specifically, the inverter can be incorporated into the microgrid through inductance. Among them, the type of inverter includes but not limited to two-level inverter, three-level inverter and multi-level inverter, and the DC power supply in the inverter circuit includes but not limited to capacitor, super capacitor and battery . In this embodiment, the current at the grid-connected point can be obtained through the current detection device.
[0050]S12. Regulate the current according to a preset control link to generate a terminal voltage of the virtual synchronous generator. Specifically, some droop control strategies can be used to regulate the current at the grid-connected point to simulate the inertia and damping characteristics ...
no. 2 example
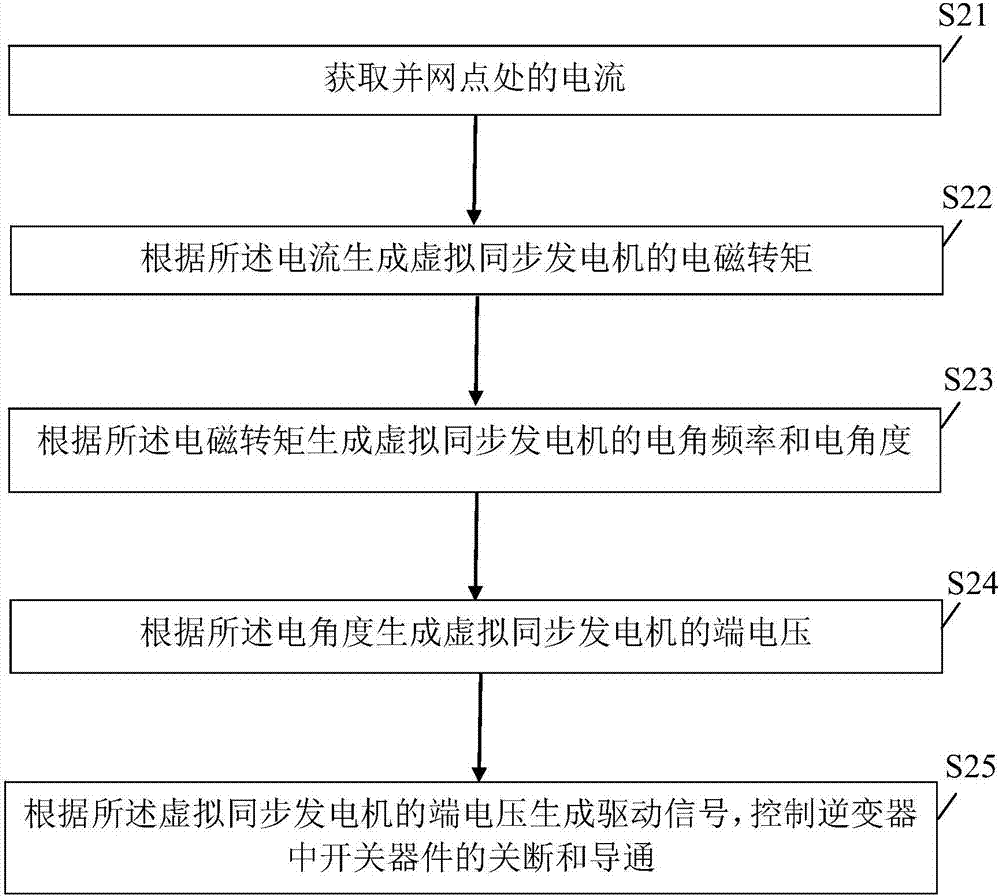
[0053] See figure 2 , is the flow chart of the second embodiment of the inverter-based synchronous power generation method provided by the present invention, the method includes:
[0054] S21. Obtain the current at the grid-connected point.
[0055] S22. Generate the electromagnetic torque of the virtual synchronous generator according to the current. Specifically, a virtual synchronous motor is assumed without a damper winding, and a constant current source is used instead of the field winding circuit. Step S22 may include: the current i at the grid-connected node a i b i c Perform abc-dq phase coordinate conversion to generate i d i q ; According to the first formula T e = 1.5pL m i f i q Calculate the electromagnetic torque T of the virtual synchronous generator e , where p is the number of pole pairs of the virtual synchronous motor, L m is the mutual inductance of the virtual synchronous motor, i f is the excitation current. For example, according to L m =...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More