

Novel four-rotor unmanned aerial vehicle with mechanical arm
A four-rotor unmanned aerial vehicle, quad-rotor technology, applied in the direction of rotorcraft, unmanned aerial vehicle, fuselage, etc., to achieve the effect of reducing the difficulty of operation, increasing the working range and operation ability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
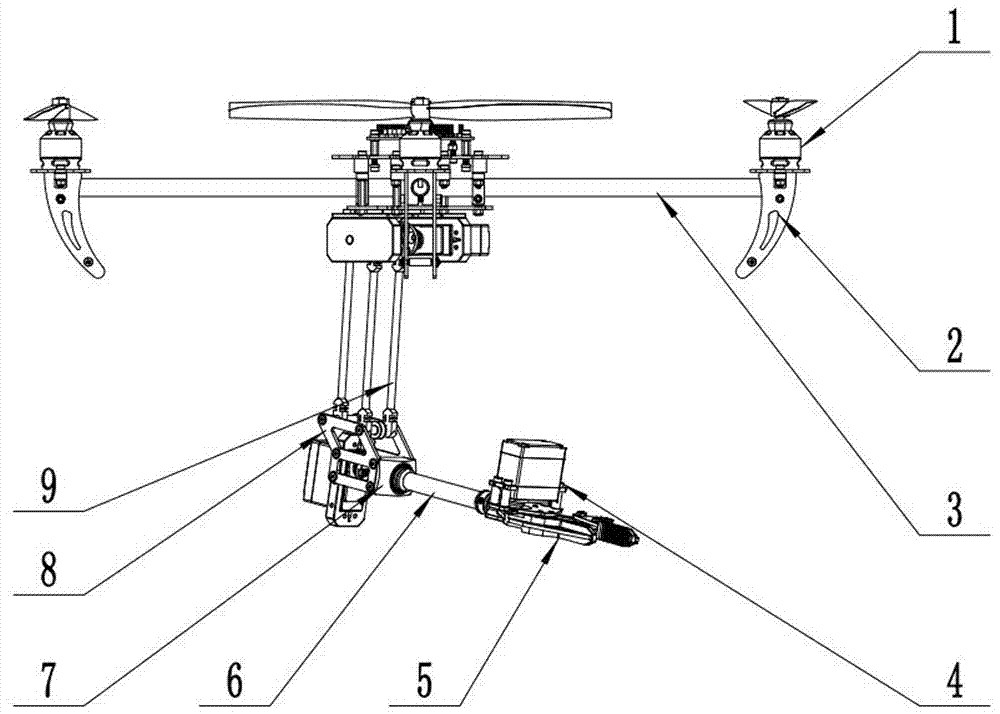
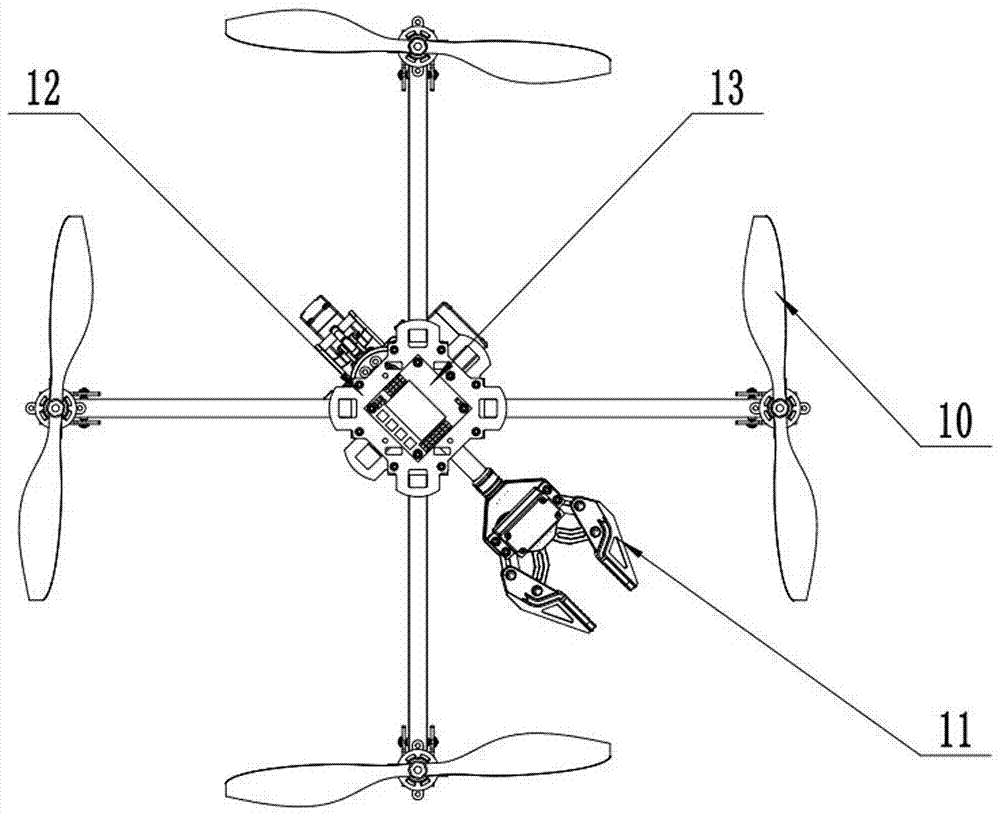
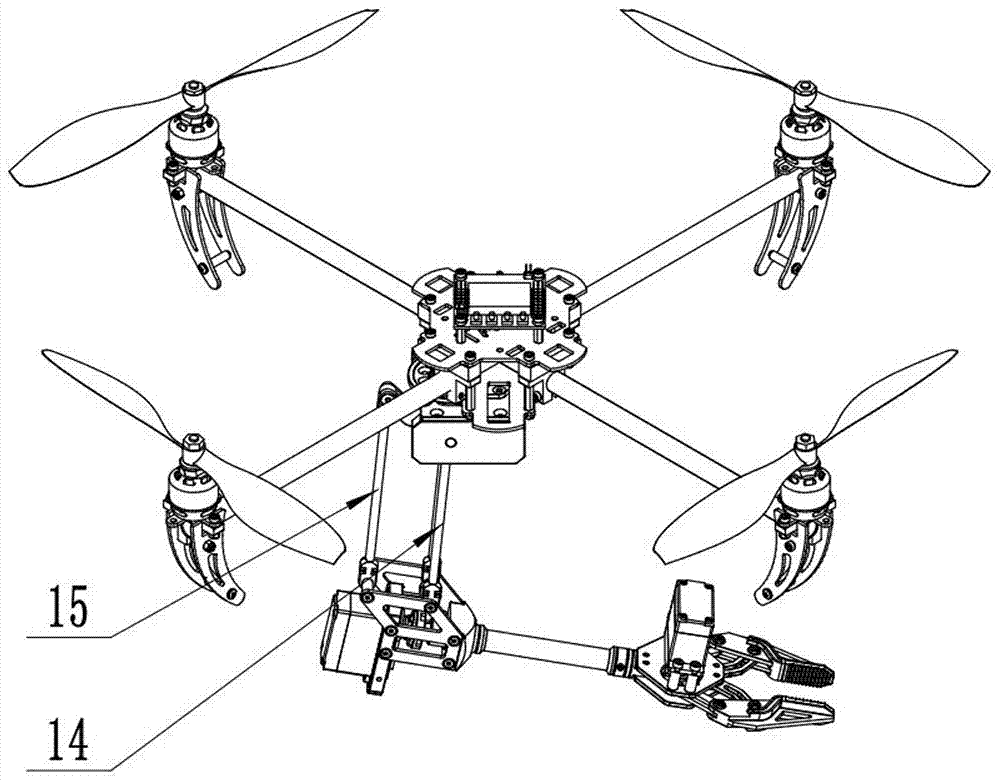
[0030] A new quadrotor UAV with arms is composed of a quadrotor UAV part, an image transmission part, a multi-degree-of-freedom mechanical arm part, a mechanical claw part and a pan-tilt camera part, wherein:
[0031] The four-rotor UAV part is composed of the main structure carbon cross bracket 3, the upper platform 12, the lower platform, the base, the motor 1 and the rotor. The two main structure carbon crosses 3 are fastened to each other through the groove in the middle, Fastening increases the contact area of the carbon cross of the main structure, and the flight stability is greatly enhanced; the upper gimbal 12 and the lower gimbal are connected with pins and bolts, and the main circuit board and other components are placed in the hollow part of the upper and lower gimbals. The upper cloud platform 12 is equipped with image transmission part components, and the lower platform is equipped with a multi-degree-of-freedom mechanical arm part. The motor 1 includes motor A...
Embodiment 2
[0042] The present invention is mainly used for tasks that cannot be completed manually under complex conditions. UAVs with mechanical arms are used to realize task requirements, and complex tasks such as water resource sampling and soil sampling are performed in polluted areas. Specific examples : Water sampling in polluted areas.
[0043] Secondly, it can also be used in high-rise fire rescue. Through its multi-degree-of-freedom mechanical claws, a rescue network can be established through collaborative work in the air, so that the trapped people in the higher floors can pass through the established rescue network. Rescued safely.
[0044] In high-altitude operations, due to the wide range of multi-free manipulators, more actions can be completed, which can realize the maintenance of high-altitude facilities such as wires and cables. At the same time, sensors (sonic waves, infrared rays, etc.) can be installed to detect the walls of high-rise buildings. Whether there are cr...
PUM
| Property | Measurement | Unit |
|---|---|---|
| Pitch angle | aaaaa | aaaaa |
Abstract
Description
Claims
Application Information
 Login to View More
Login to View More