

Track planning method for mechanical arm
A trajectory planning and robotic arm technology, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve problems such as poor Cartesian space trajectory planning effect and accuracy, high cost of small robotic arms, and complex calculations, reducing the amount of calculation. , the effect of shortening the limit interpolation period and reducing the numerical calculation error
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0024] In order to make the object, technical solution and advantages of the present invention more clear, the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments. It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention. In addition, the technical features involved in the various embodiments of the present invention described below can be combined with each other as long as they do not constitute a conflict with each other.
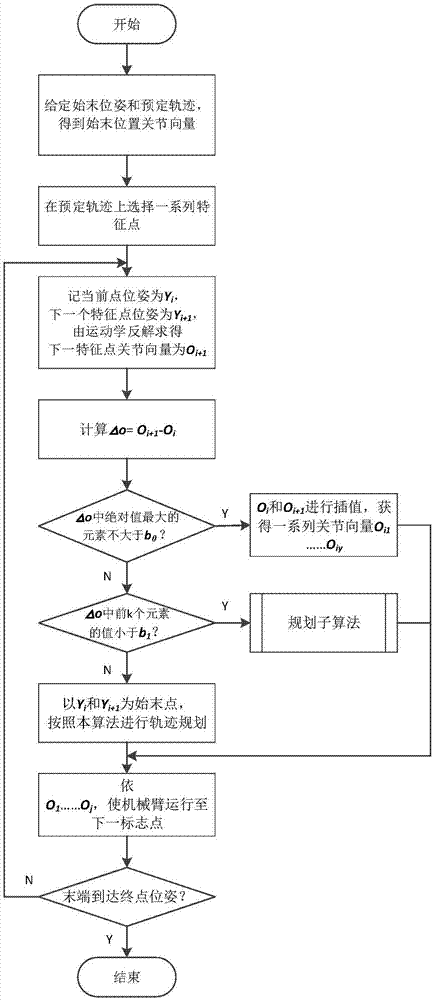
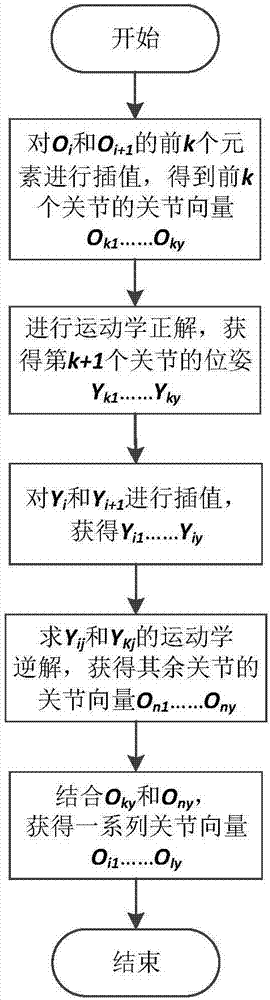
[0025] figure 1 is a schematic diagram of the process flow of the trajectory planning method constructed according to the present invention. Such as figure 1 and figure 2 As shown in , the process mainly includes the following process steps:
[0026] Step 1, for the robot arm as the planning object, obtain multiple parameters related to its end, including the initial pose, the end pose a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More