

Cruising robot pan-tilt adjustment method based on visual feedback
A technology of visual feedback and adjustment method, which is applied in the direction of manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems of inspection collection image deviation, mechanical equipment wear, offset, etc., to achieve automatic control adjustment and high degree of intelligence , the effect of high control precision
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
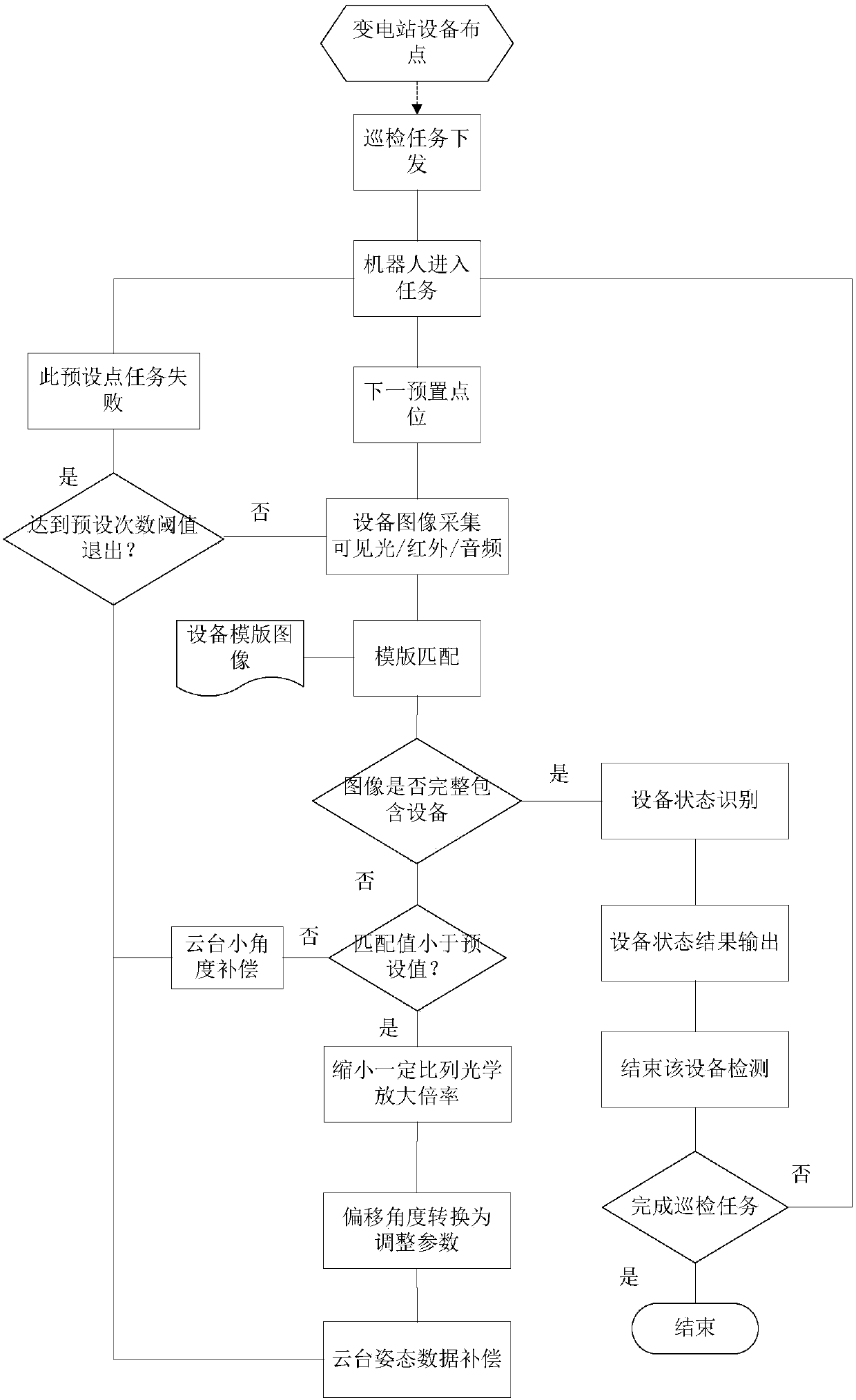
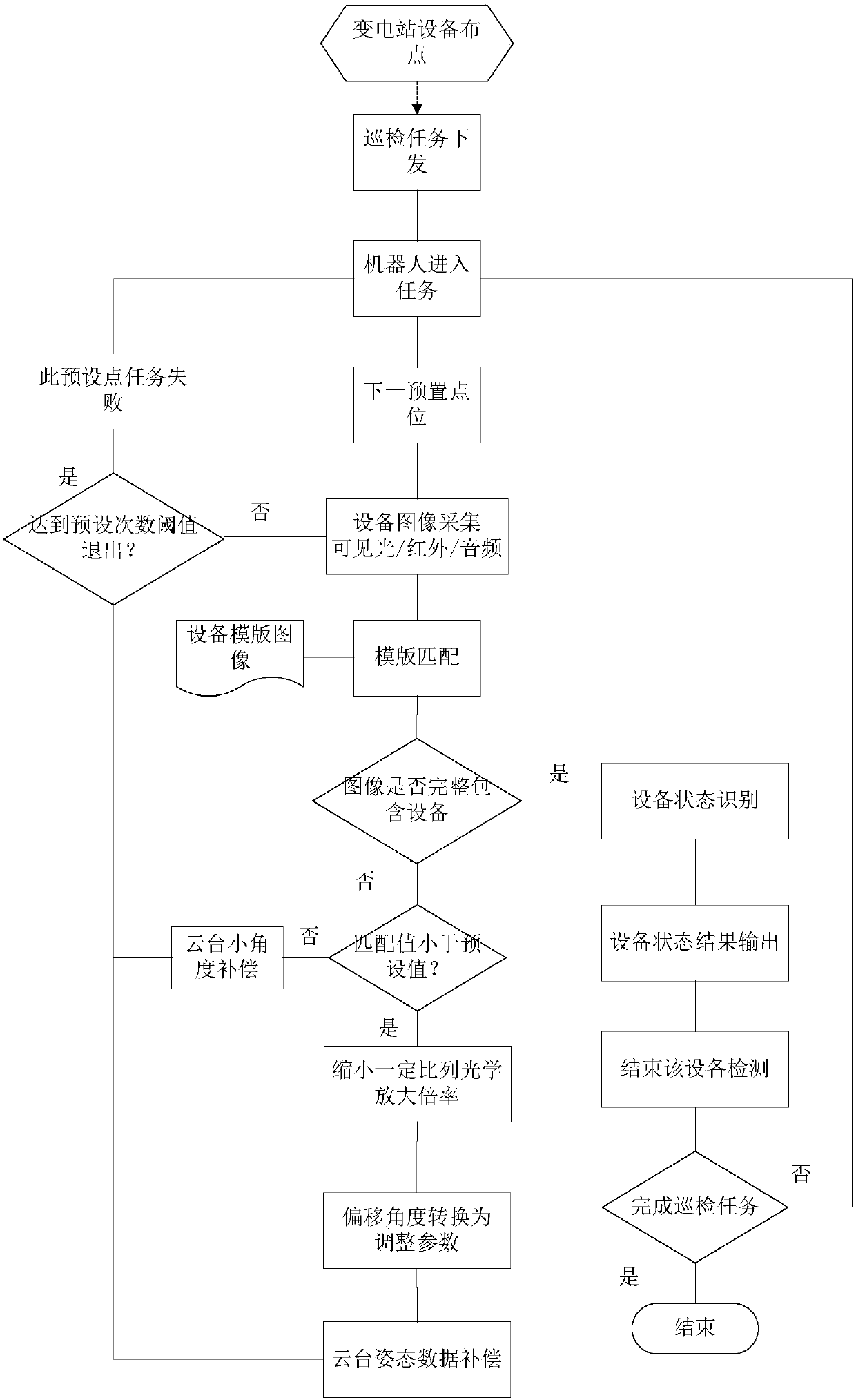
[0052] refer to figure 1 , the invention provides a method for adjusting the pan-tilt of a patrol robot based on visual feedback, comprising steps:
[0053] S1. The inspection robot conducts inspections. During the inspection process, it obtains the corresponding pan / tilt attitude data and camera parameters from the database before shooting, and sends the device images captured by real-time shooting to the server; the inspection robot receives the background inspection data When the inspection task issues instructions, the inspection robot automatically starts the inspection mode, and performs inspections in accordance with the preset inspection path sequence. During the inspection process, it stops when it reaches the preset position, and calls the gimbal attitude data at the position in the database. That is, the pitch angle and rotation angle of the gimbal, as well as the parameters of the camera, including magnification and focus value, etc.;
[0054] S2. After the server...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More