

Kinematic calibration system and method for industrial robot
An industrial robot and calibration system technology, applied in the field of kinematics calibration system of industrial robots, can solve the problems of complex operation and expensive equipment, and achieve the effects of simple operation, low cost, and improved absolute positioning accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0029] Embodiments of the present invention will be described in further detail below in conjunction with the accompanying drawings.
[0030] Figure 1 to Figure 6 Shown is the structural representation of the present invention.
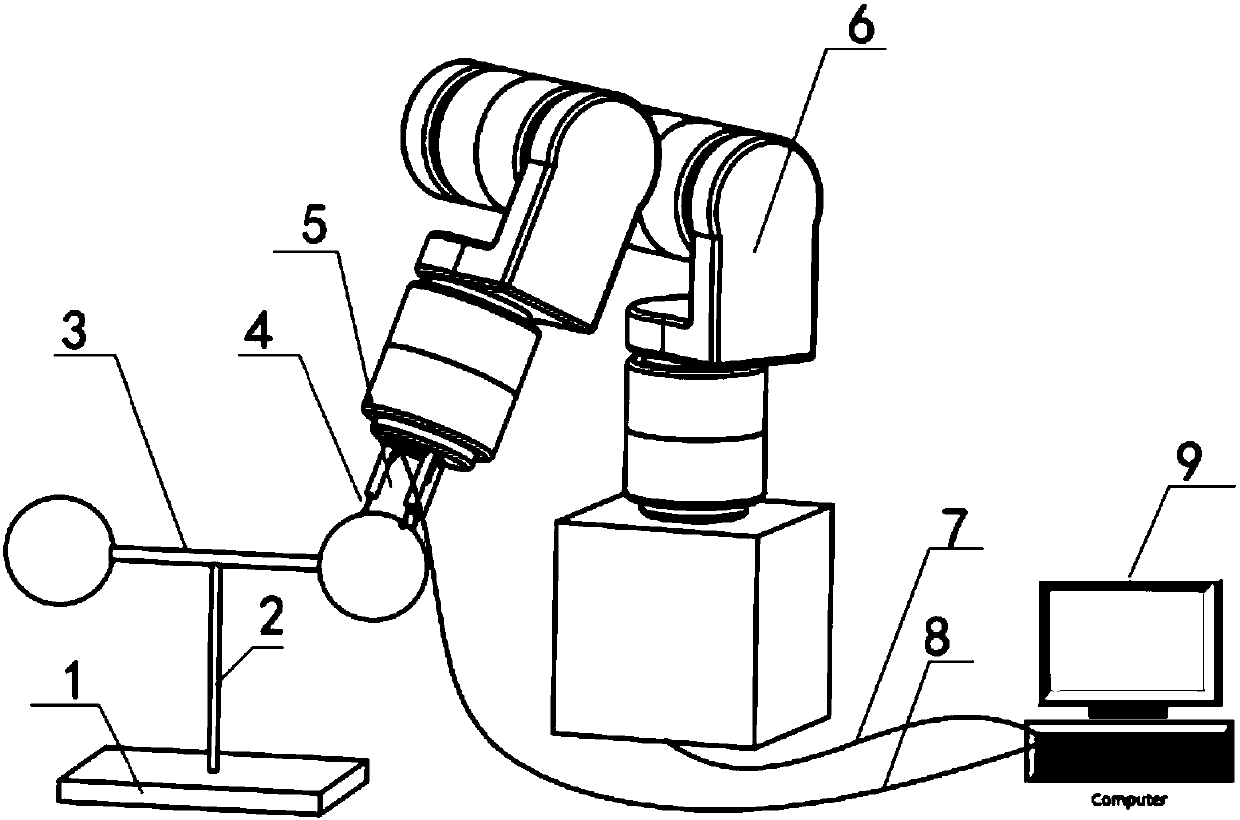
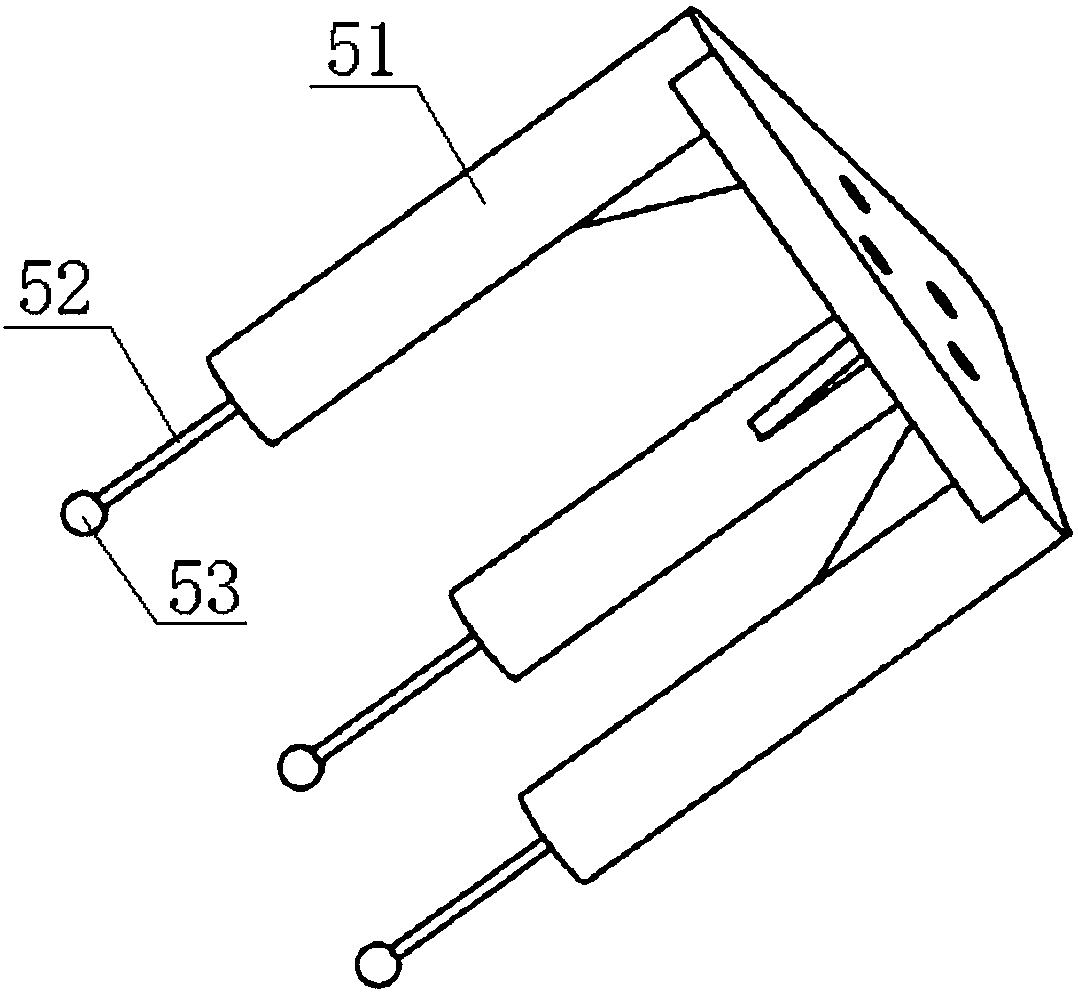
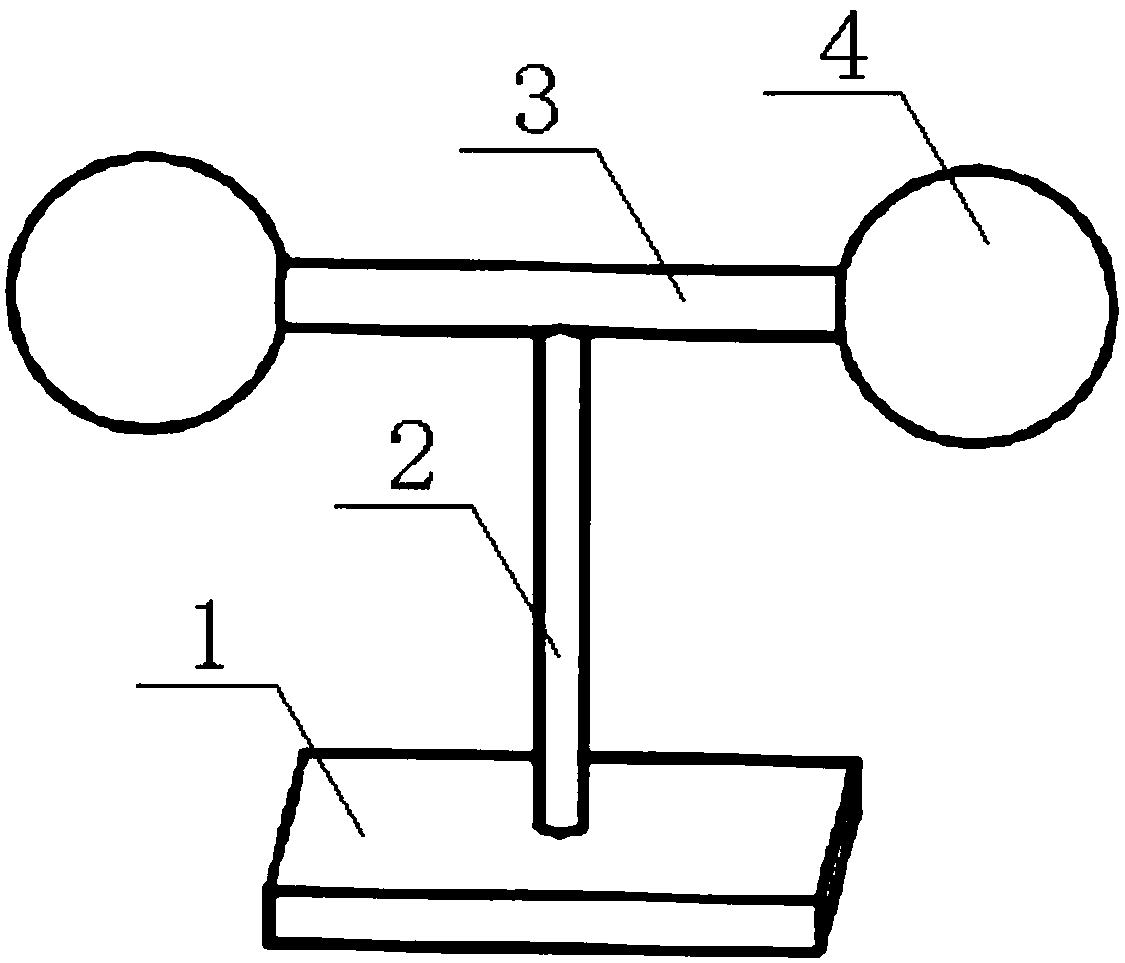
[0031] The reference signs therein are: measurement target base 1, installation rod 2, connecting rod 3, target sphere 4, end effector 5, sleeve 51, telescopic shaft 52, execution ball 53, robot 6, first cable 7, The second cable 8, the computer 9.
[0032] The kinematics calibration system for industrial robots of the present invention includes a measurement target placed in a working area, a robot 6 , an end effector 5 arranged on the robot 6 , and a computer 9 . The end effector 5 includes three independent telescopic detection clubs located at the execution end of the robot 6 , and each detection club is provided with a displacement sensor for detecting the telescopic displacement of the center of the ball. The computer 9 is provided with a fi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More