

Six-dimensional force sensor with elastomer structure
A six-dimensional force sensor and elastic body structure technology, applied in the field of sensors, can solve the problems of restricting measurement accuracy, affecting force feedback and force control performance, and achieve the effects of improving measurement accuracy, reducing measurement error, and simplifying decoupling algorithms
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0012] The present invention will be further described below in conjunction with the accompanying drawings and specific embodiments.
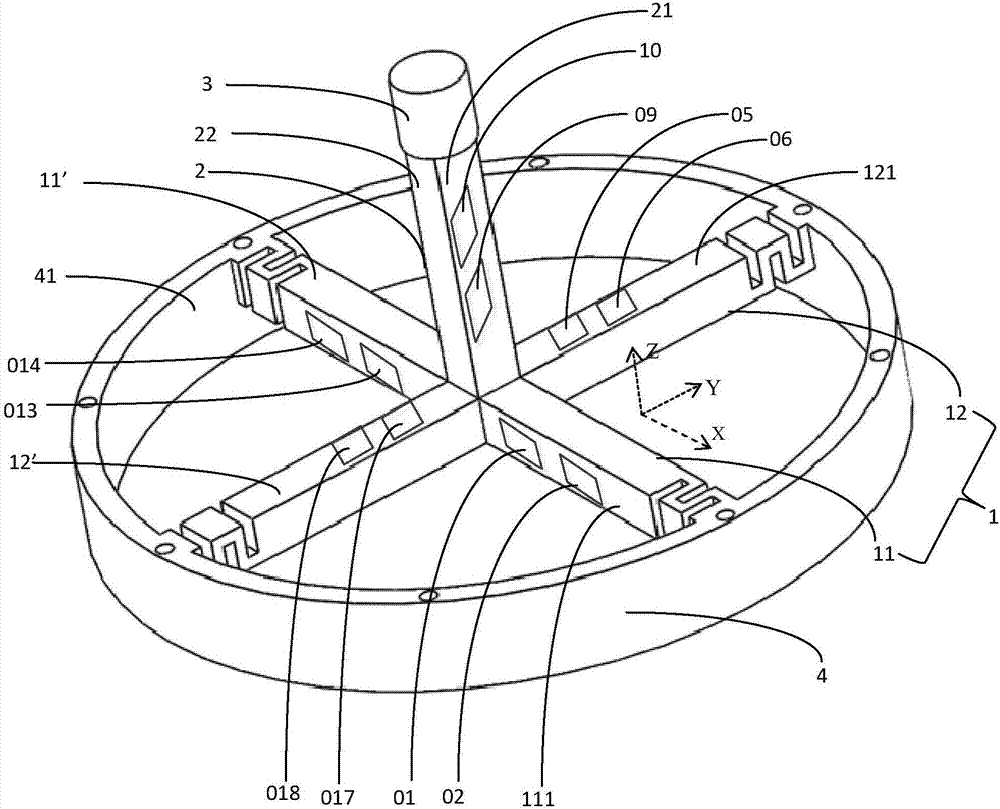
[0013] Such as figure 1 As shown, in order to facilitate the description of the direction, a spatial Cartesian coordinate system is established as shown in the figure.
[0014] Such as figure 1 As shown, the six-dimensional force sensor with an elastic body structure includes a horizontal elastic beam 1, a central vertical elastic beam 2, a loading shaft 3 and an outer ring fixing platform 4, the horizontal elastic beam 1 is a cross-shaped structure, and the horizontal elastic beam 1 includes Four equal-length branches, one end of the central vertical elastic beam 2 is fixed at the center of the cross-shaped structure of the horizontal elastic beam 1, and is perpendicular to the surface where the cross-shaped structure is located, and the loading shaft 3 is installed on the central vertical elastic beam 2 The other end of the outer ring fixin...
PUM
| Property | Measurement | Unit |
|---|---|---|
| Thickness | aaaaa | aaaaa |
Abstract
Description
Claims
Application Information
 Login to View More
Login to View More