

Quadruped robot control method and control device on the basis of sine opposite angle gait and quick table look-up method
A quadruped robot and robot movement technology, applied in the direction of program-controlled manipulators, instruments, manipulators, etc., can solve the problems of easy disturbance caused by foot end sliding, high calculation cost, poor anti-interference ability, etc., and achieve wide application value and research significance Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0094] A motion control method for a quadruped robot based on sinusoidal diagonal gait and fast look-up table method. The quadruped robot includes a torso and four legs connected to the torso. The two legs on the line swing in the same motion, the two legs that support the trunk and push the trunk forward are called the support phase, and the two legs on the other diagonal that swing according to the preset trajectory are called the swing phase , including the following steps:
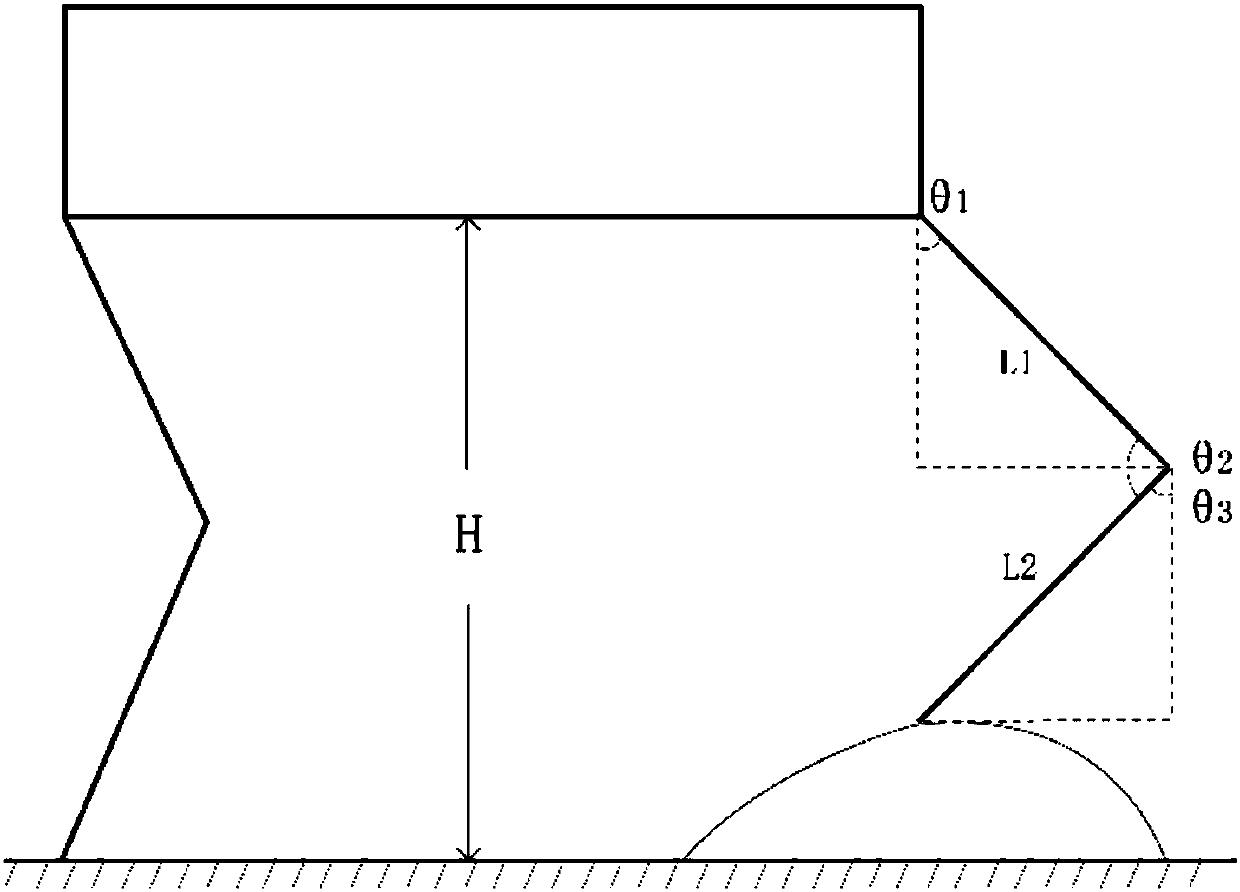
[0095] (1) By analyzing the leg structure of the quadruped robot, construct the mathematical model of the leg motion of the quadruped robot, including the position model of the foot end of the quadruped robot:
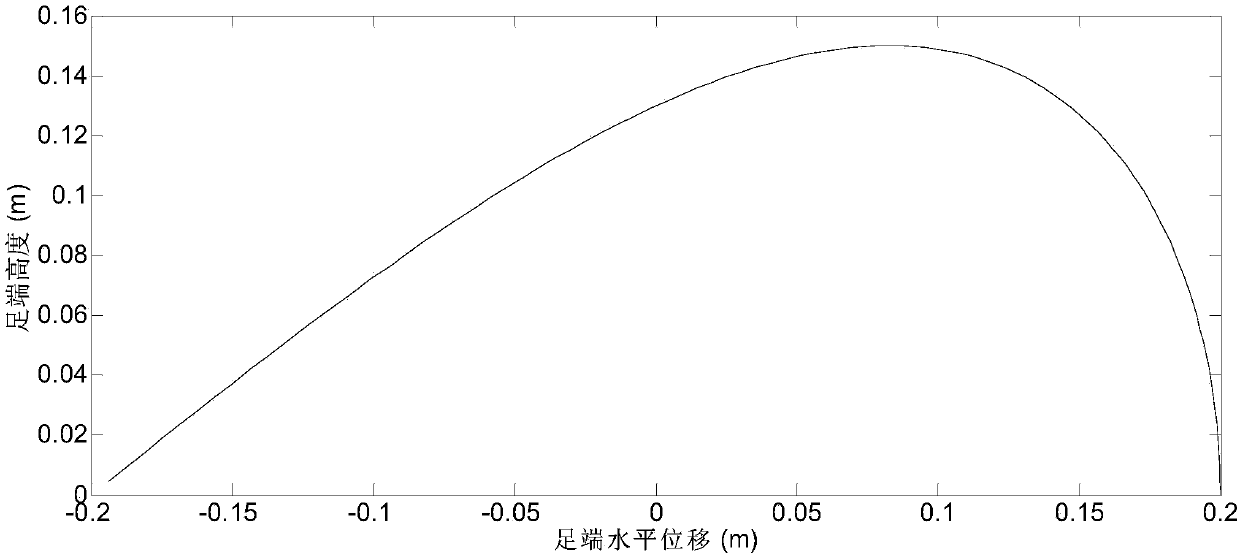
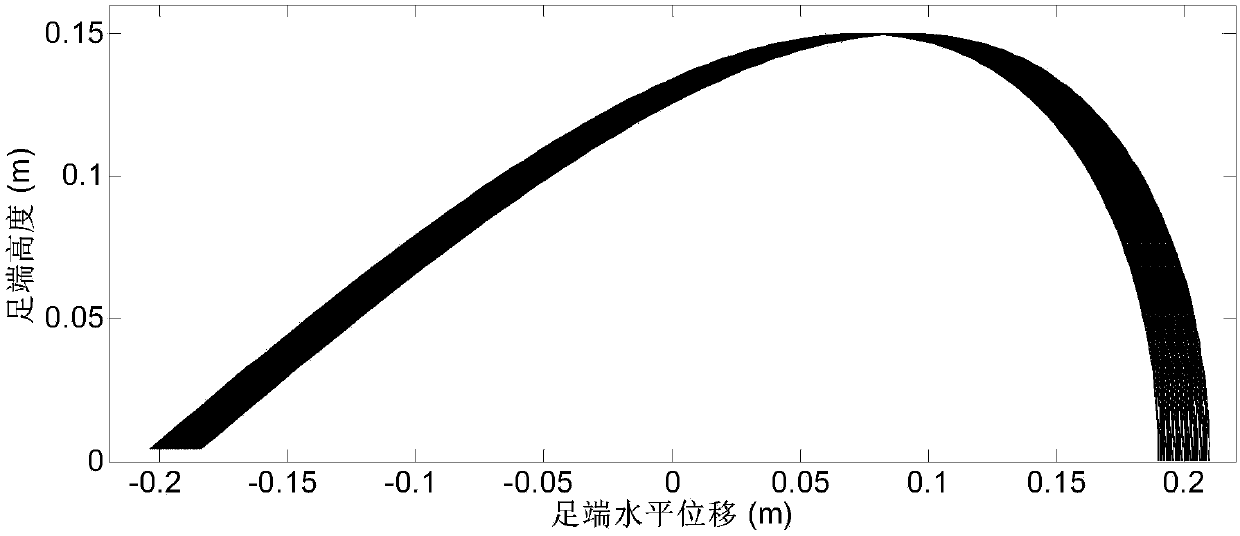
[0096]Each leg includes a thigh and a lower leg; a step cycle of a quadruped robot includes a support phase and a swing phase. In the torso coordinate system, the x-axis represents the displacement of the foot in the horizontal direction, the y-axis represents the height of the foot, and the or...
Embodiment 2
[0162] A quadruped robot motion control device based on sinusoidal diagonal gait and fast look-up table method, including a foot trajectory control unit and a steering control unit; Figure 4 It is the control schematic diagram of the foot track control unit;
[0163] The foot track control unit is used to complete the following operations:
[0164] The foot track control unit receives the movement distance U_r_1 of the last cycle of the robot and the guided movement distance dr of this cycle. When the movement starts, the quadruped robot will adjust its posture to a ready posture. At this time, the corresponding S_1 is 0.4m, and the corresponding S_1 is 0.4m. S and S_1 can be obtained by iterative operation of formula (XVI):
[0165]
[0166] In formula (XVI), S_2 is the step size of the penultimate cycle;
[0167] According to the obtained S_1 and S, perform a quick table lookup, and obtain the support phase control matrix with the support phase joint control rate and t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More