

Robot control system
A control system and robot technology, applied in the direction of program control manipulators, manipulators, manufacturing tools, etc., can solve the problems of bulky retractors, occupying volume, and limited wheel movement, and achieve flexible motion performance, stable working conditions, and vibration mitigation. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0028] In order to make the purpose, technical features and advantages of the present invention more understandable to those in the relevant technical field, and to implement the present invention, the technical features and implementation modes of the present invention are specifically explained in conjunction with the attached drawings, and listed The preferred embodiment is further described. The drawings compared in the following text are for expressing the schematic representations related to the features of the present invention, and are not and need not be completely drawn according to the actual situation. The description of the implementation of this case involves technical content well known to those skilled in the art, and will not be stated again.
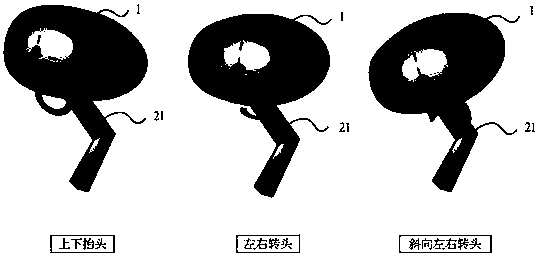
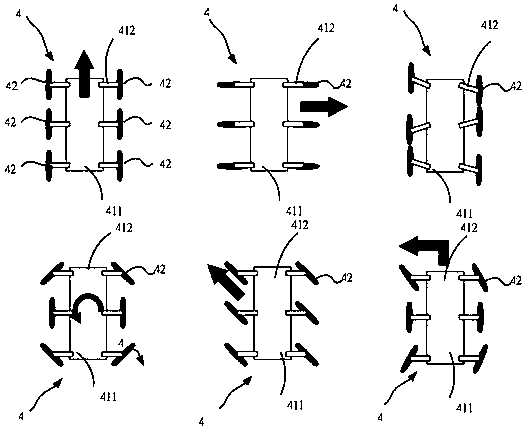
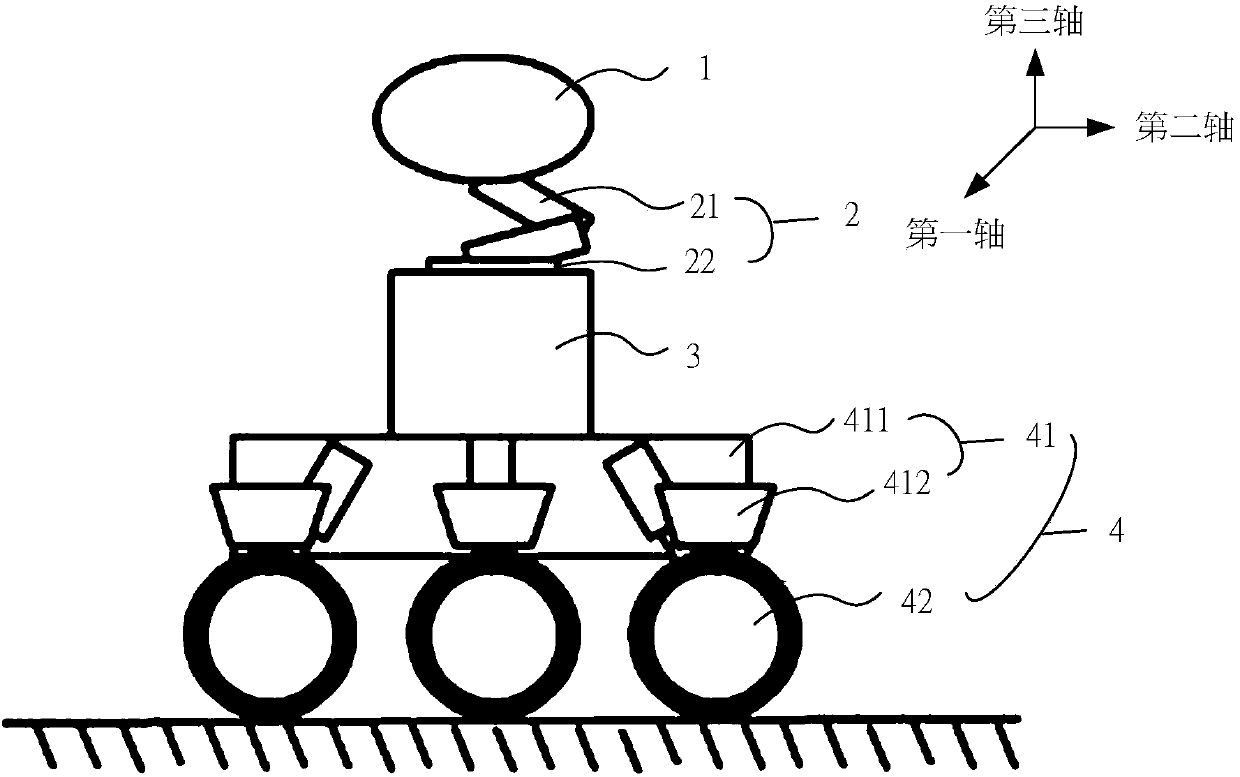
[0029] Please refer to figure 1 , figure 1 It is the architecture diagram of each component of the robot control system. It includes a head 1 , a neck 2 , a main body 3 and a chassis 4 . The head 1 includes a visual...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More