

Vibration absorbing type underwater four-foot wall-climbing robot
A wall-climbing robot and adsorption technology, applied in the field of robotics, can solve problems such as time-consuming, inflexible walking, and complex structure, and achieve the effects of improving work efficiency, improving motion performance, and improving motion ability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
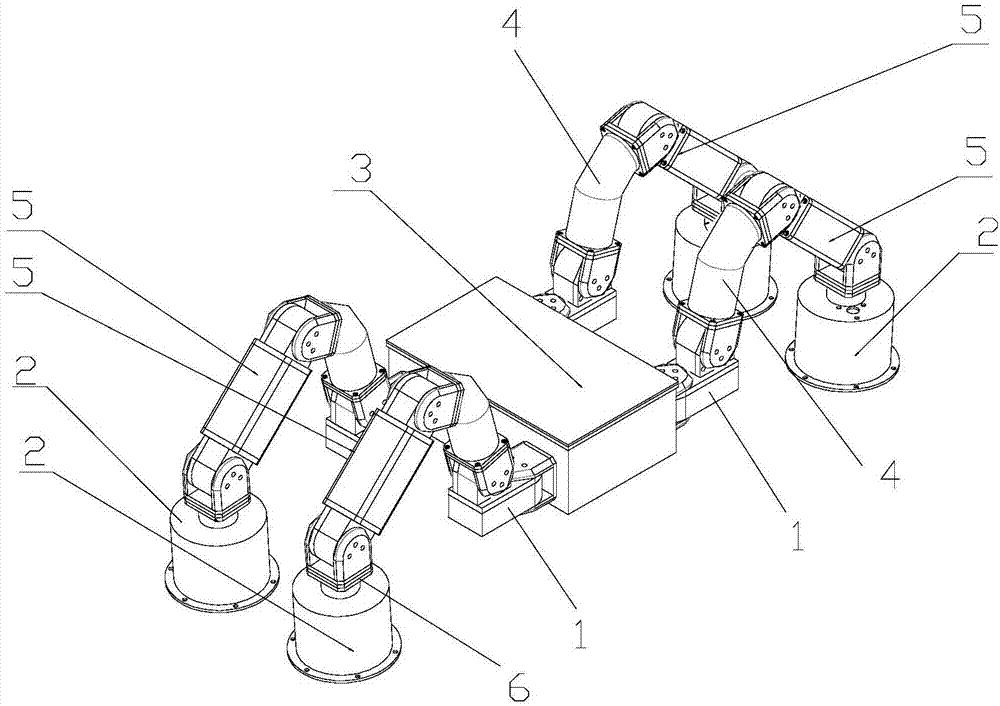
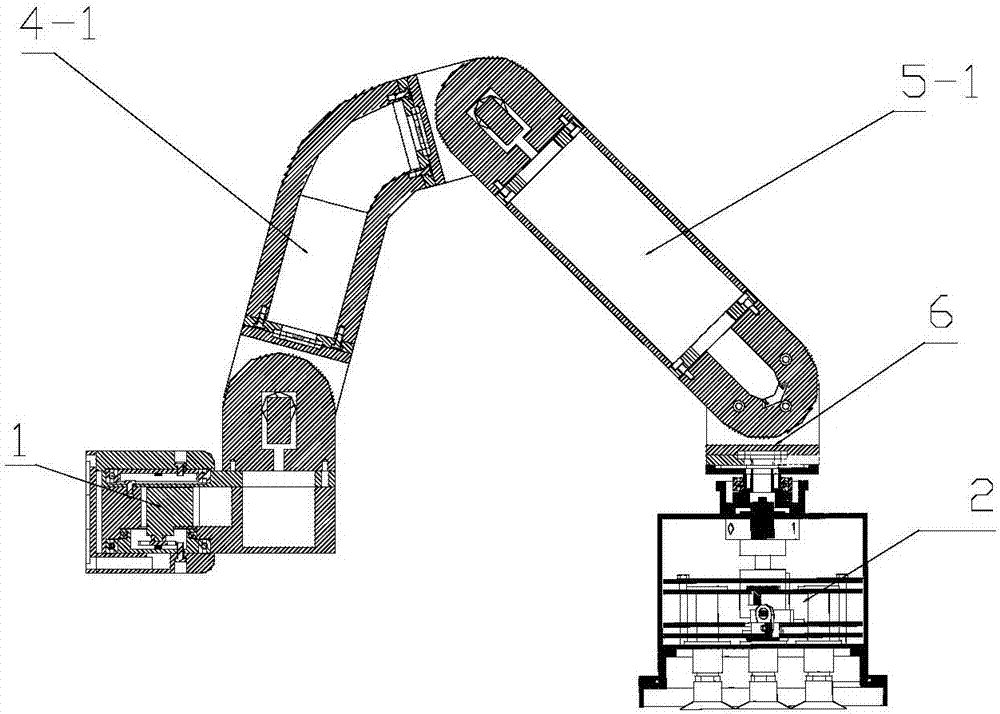
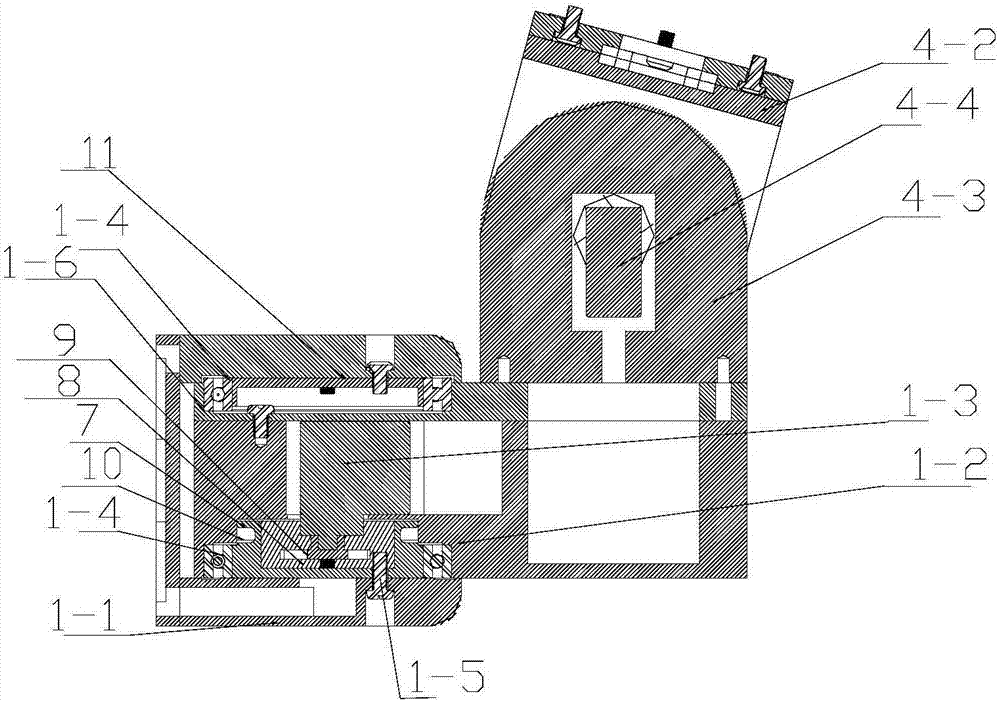
[0030] figure 1 It is a schematic diagram of the overall structure of the present invention, figure 2 It is a schematic diagram of the cross-sectional structure of the mechanical leg in the present invention, image 3 It is a schematic cross-sectional view of the matrix structure in the present invention, Figure 4 It is the explosion diagram of the second joint and the third joint structure in the present invention, Figure 5 It is a schematic diagram of the cross-sectional structure of the second joint and the third joint in the present invention, and Fig. 6 is a schematic exploded view of the structure of the lower leg in the present invention, Figure 7 It is a schematic diagram of the connection structure between the terminal leg and the vibration adsorption device in the present invention, Figure 8 It is a sectional view of the lower leg in the present invention, Figure 9 It is a schematic diagram of the structure of the fourth joint block in the present invention...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More