

Direct Estimation Method of Pose with High Accuracy for Calibration Area Array Camera Image
An area scan camera, pose estimation technology, applied in the direction of photo interpretation, etc., can solve the problems of difficult technology development, high basic requirements, and complex application scope.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0060] An embodiment of the present invention will be further described below in conjunction with the accompanying drawings.
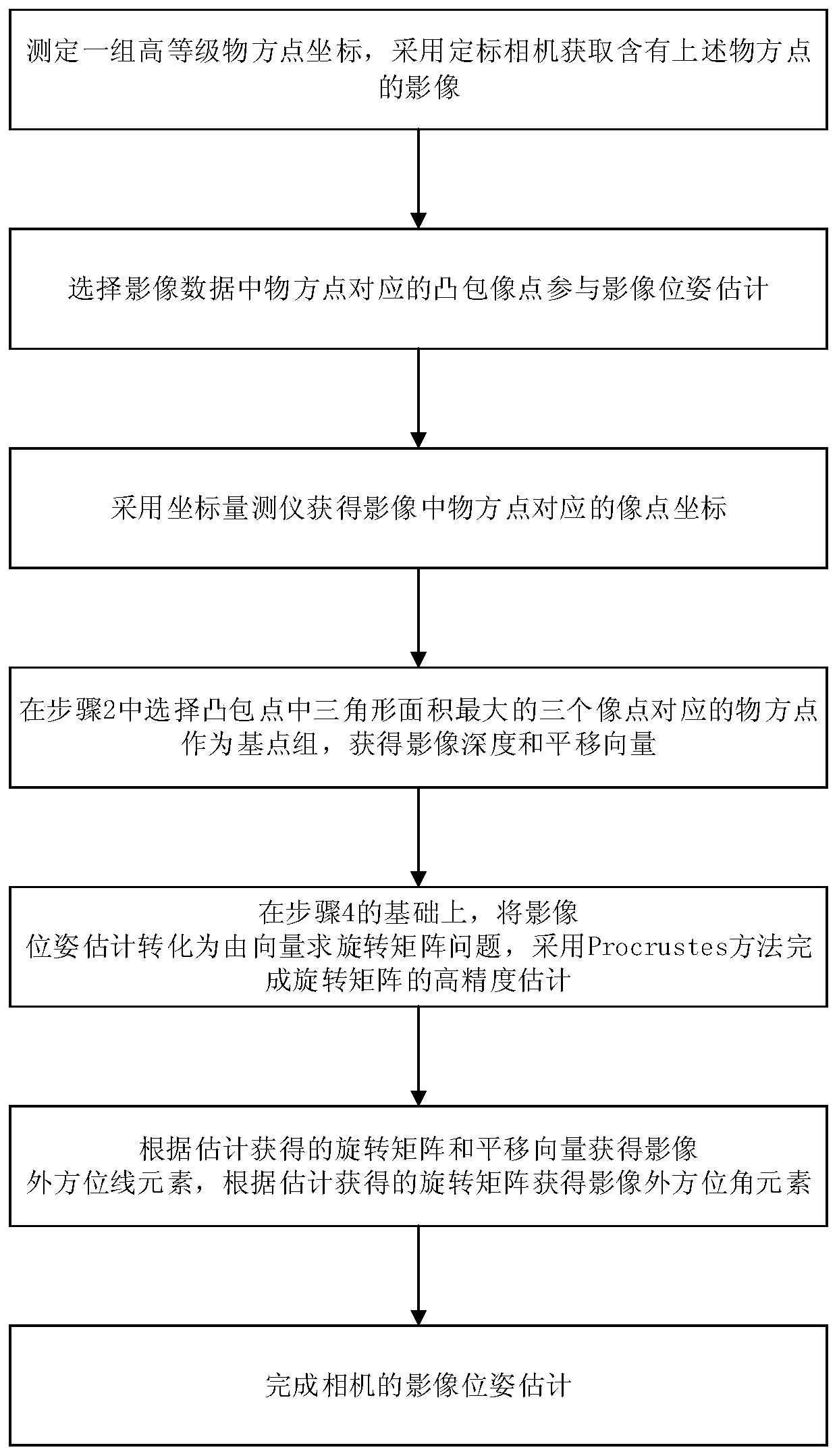
[0061] In the embodiment of the present invention, a method for directly estimating the pose of a calibration area camera image with high precision, the flow chart of the method is as follows figure 1 shown, including the following steps:
[0062] Step 1. Determine the coordinates of a group of high-level object space points, and use the calibration camera to obtain images containing the above object space points;
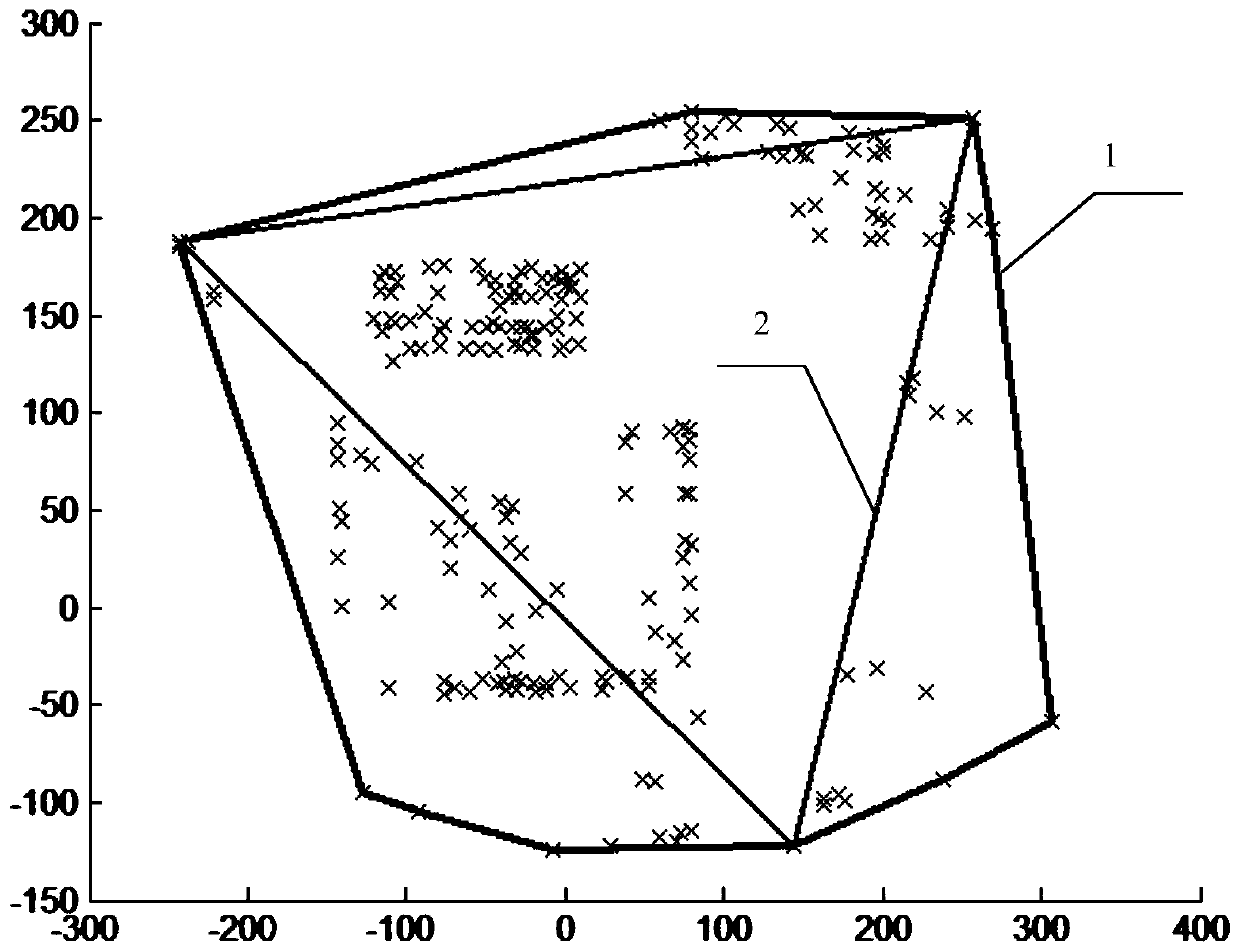
[0063] Step 2. Select the convex hull image points corresponding to the object space points in the image data to participate in image pose estimation;
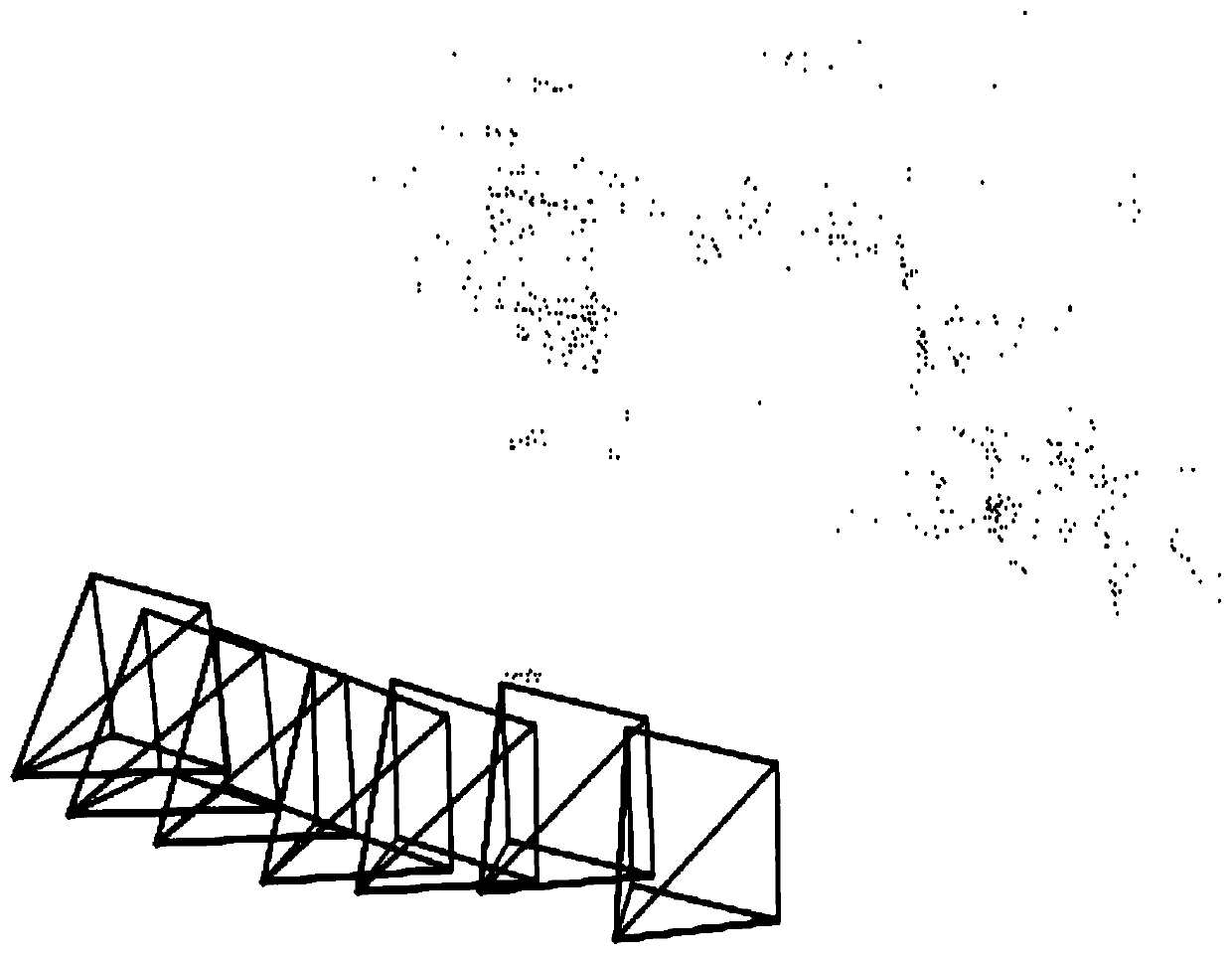
[0064] In the embodiment of the present invention, select 7 pieces of image data, such as figure 2 As shown; select the convex hull points in all image points in each experimental image data to participate in the estimation, the number of points with the same name participating in the es...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More