

SINS/DVL integrated navigation filtering method based on 5-order SSRCKF
A technology combining navigation filtering and navigation coordinate system, applied in the field of navigation, can solve problems such as decreased accuracy and unusability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0064] Embodiments of the present invention will be described in detail below in conjunction with the accompanying drawings;
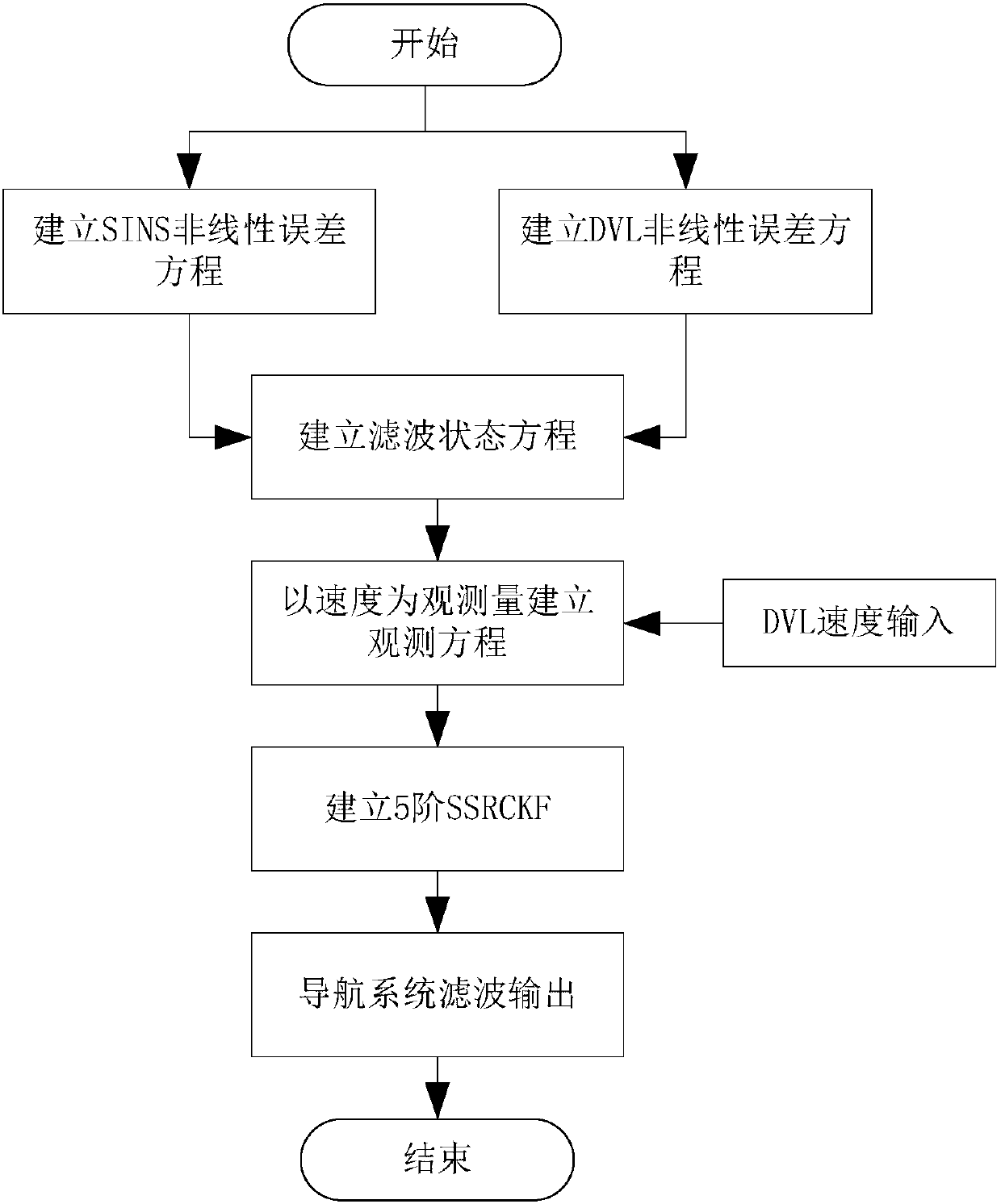
[0065] Such as figure 1 As shown, the SINS / DVL combined navigation filtering method based on 5th order SSRCKF (Spherical Simplex-Radial Cubature Kalman Filter, spherical surface minimum phase diameter volumetric Kalman filter) of the present invention comprises the following steps:
[0066] Step 1: Establish the nonlinear error model of SINS (Strap-down Inertial Navigation System, Strap-down Inertial Navigation System): In SINS, select the northeast sky geographic coordinate system as the navigation coordinate system (n), and use the autonomous underwater vehicle (Autonomous Underwater Vehicle) , AUV) establishes the carrier coordinate system (b) by itself, and gives the actual calculation navigation coordinate system (n′), establishes the error model of the inertial device gyroscope and speedometer, and solves the attitude error equation and position ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More