

Intelligent driving local track fault tolerance planning method based on lane lines and GPS following
A technology of intelligent driving and lane line, applied in traffic control system of road vehicles, surveying and navigation, road network navigator and other directions, can solve the problems of GPS/IMU positioning distortion, lane misidentification, lane discontinuity, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0093] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
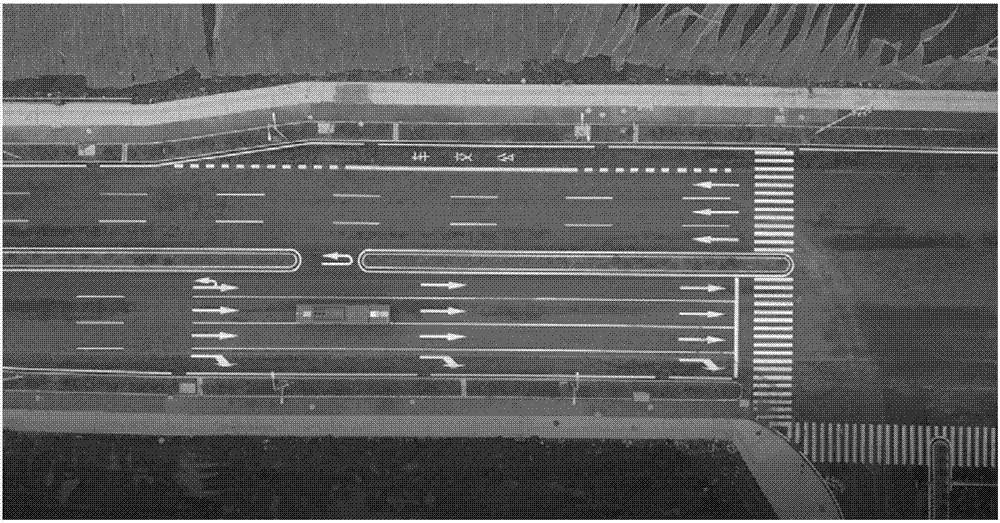
[0094] In this embodiment, a 12m-long, 2.5m-wide bus modified intelligent driving vehicle is equipped with laser radar, millimeter-wave radar, camera and GPS / IMU system, and a local trajectory fault-tolerant planning experiment is carried out on a standard straight road, such as figure 2 As shown, the aerial photograph of the experimental site of the present embodiment.
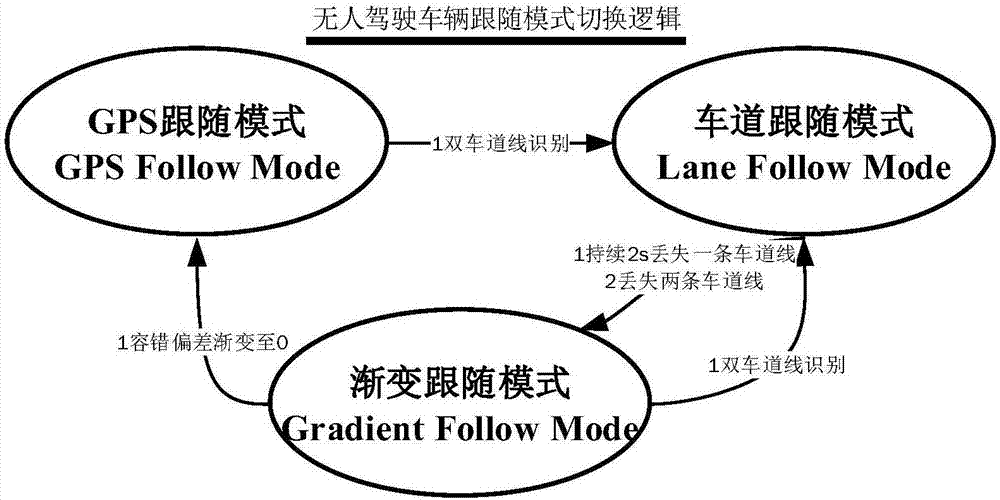
[0095] Such as figure 1 As shown, the present invention is used in the following mode transition chain diagram for local trajectory fault-tolerant planning.
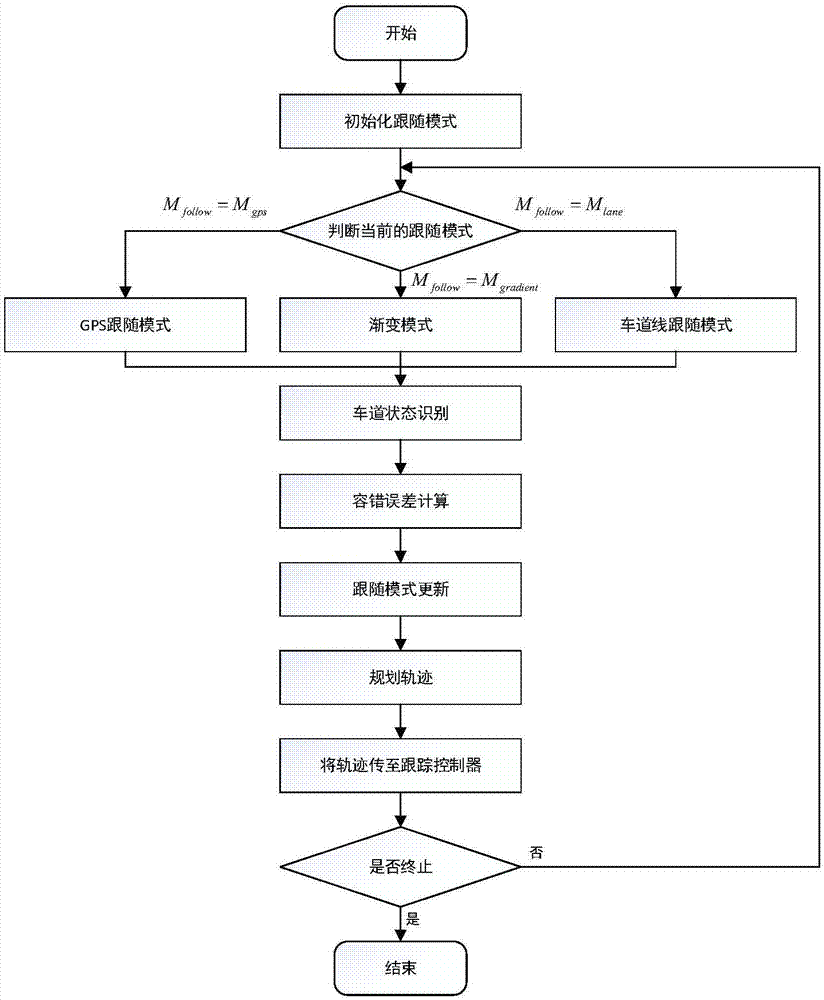
[0096] Such as image 3The flow chart of the local trajectory fault-tolerant planning method shown is a local trajectory fault-tolerant planning method for intelligent driving based on lane lines and GPS following. The local planning cycle is 50ms, and each planning cycle specifically includes the following steps:
[0097] A ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More