

Modularization driving device of multilevel flexible curved tube medical robot
A medical robot and driving device technology, applied in the field of medical equipment, can solve the problems of inconvenience, wire design and guiding devices, etc., and achieve the effects of low cost, saving a lot of space, and simple mechanical structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0041] The present invention will be described in detail below in conjunction with the accompanying drawings and specific embodiments.
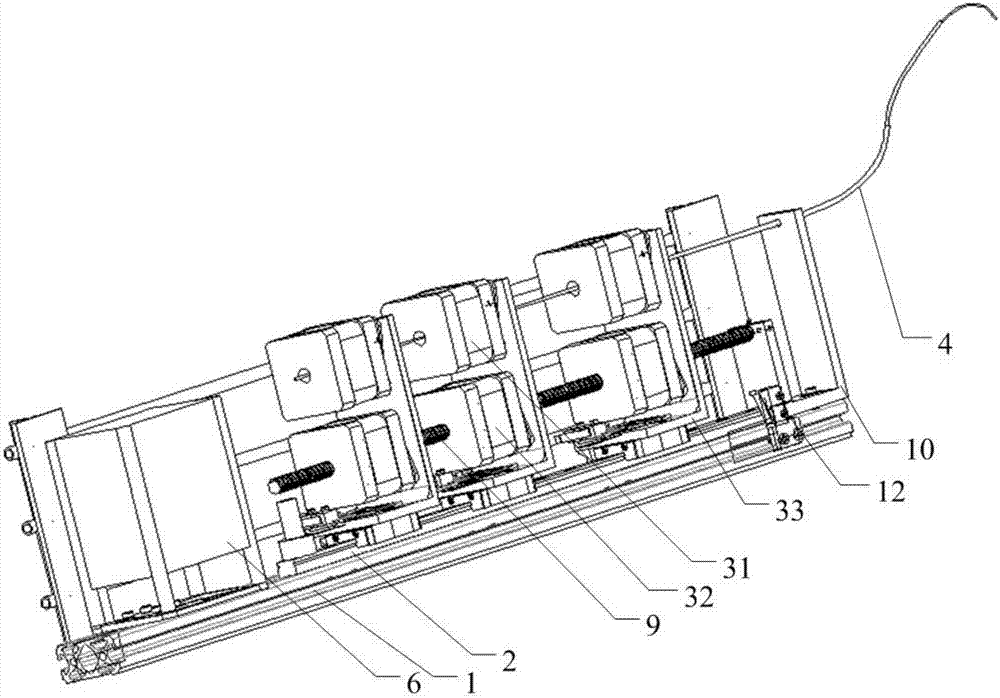
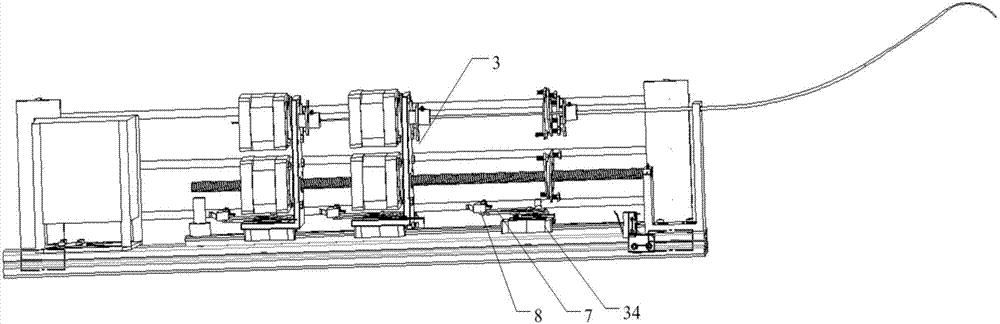
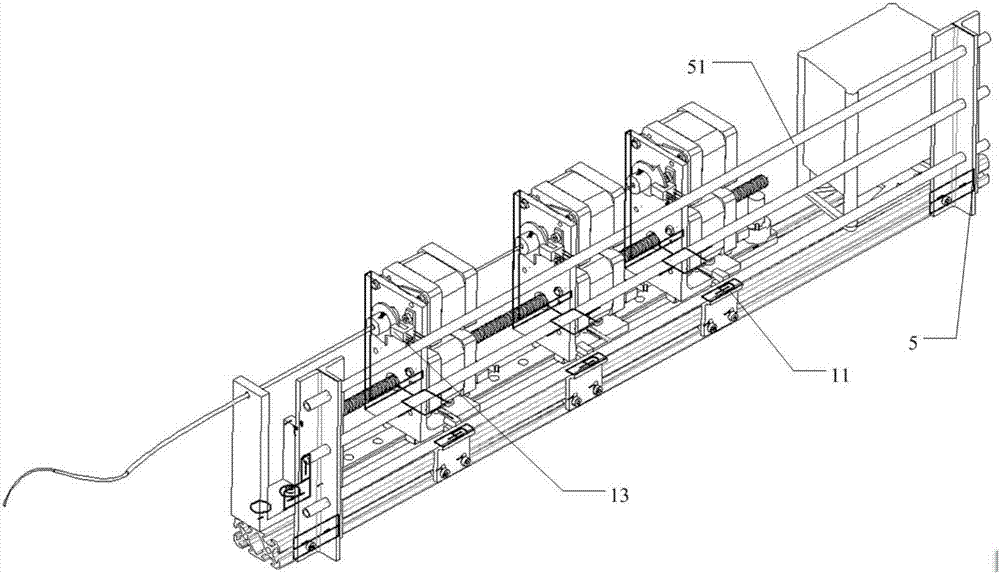
[0042] refer to Figures 1 to 3 As shown, a modular drive device for a multi-stage flexible curved tube medical robot includes a base 1, a linear guide rail 2, at least one drive module 3, flexible curved tubes 4 with the same number as the drive module 3, and an electronic drive device 6 The linear guide rail 2 is fixedly arranged on the base 1; the driving module 3 is slidingly connected to the linear guide rail 2; the driving module 3 is detachably connected to the flexible curved pipe 4; the cable arrangement 5 is connected to the base 1 is vertically arranged on one side; the electronic driving device 6 is arranged on the upper part of one end of the base 1, and the electronic driving device 6 is electrically connected with the driving module 3.
[0043] Wherein, the drive module 3 includes a hollow long-axis motor 31, a hollow threaded...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More