

Novel hexapod bio-robot
A hexapod robot and a new type of technology, applied in the field of robots, can solve the problems of difficulty in walking in all directions, high cost, complex structure control, etc., and achieve the effects of improving joint positioning accuracy, reducing overall energy consumption, and reducing control difficulty.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
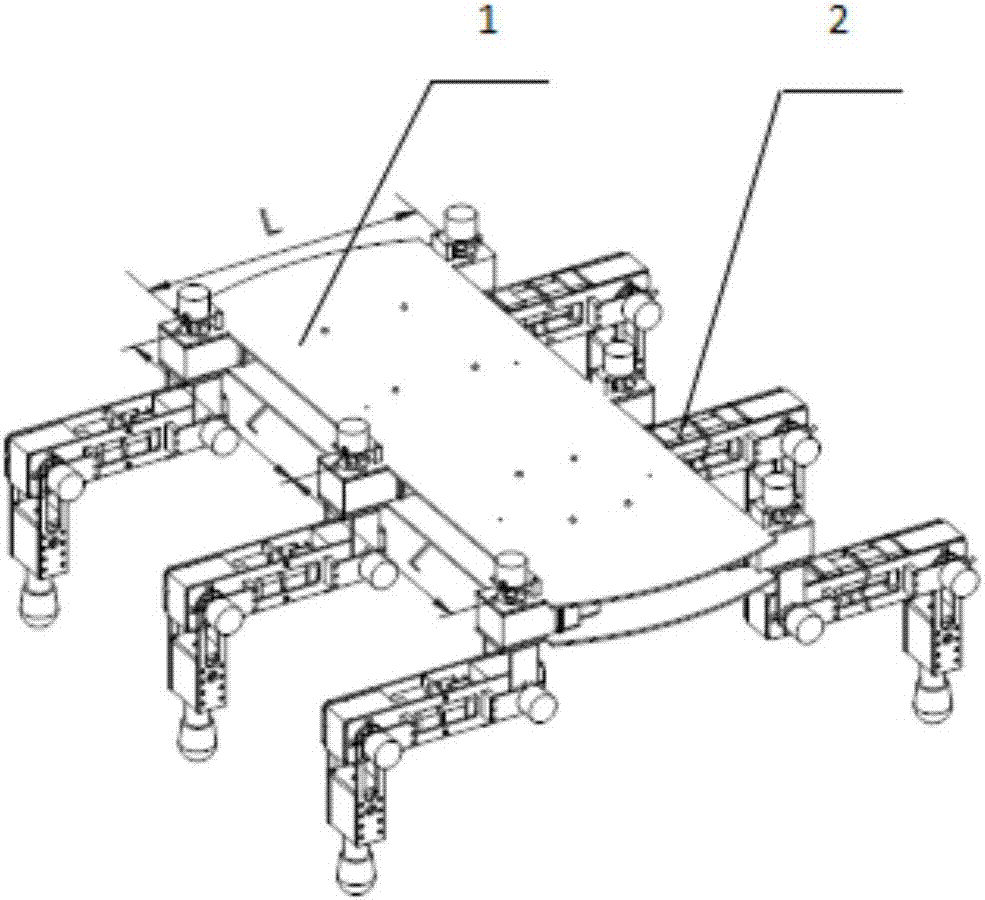
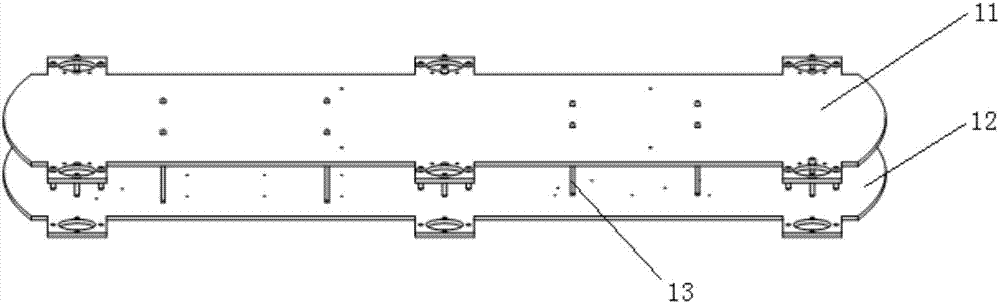
[0053] The novel bionic hexapod robot of this embodiment comprises a body platform 1 and six modularized mechanical feet 2 of the same structure; Plate 12 and connecting plate 13, the shape dimension of frame upper plate 11 and frame lower plate 12 is identical, and frame upper plate 11 is connected with frame lower plate 12 by connecting plate 13, on frame upper plate 11 along the length direction two There are six mechanical feet 2 arranged symmetrically through flanges between the upper rack plate and the lower rack plate on the side, and the distance between any two adjacent mechanical legs 2 is equal, that is, the length direction and the width direction are adjacent to each other. The distance L between the two mechanical feet is equal;
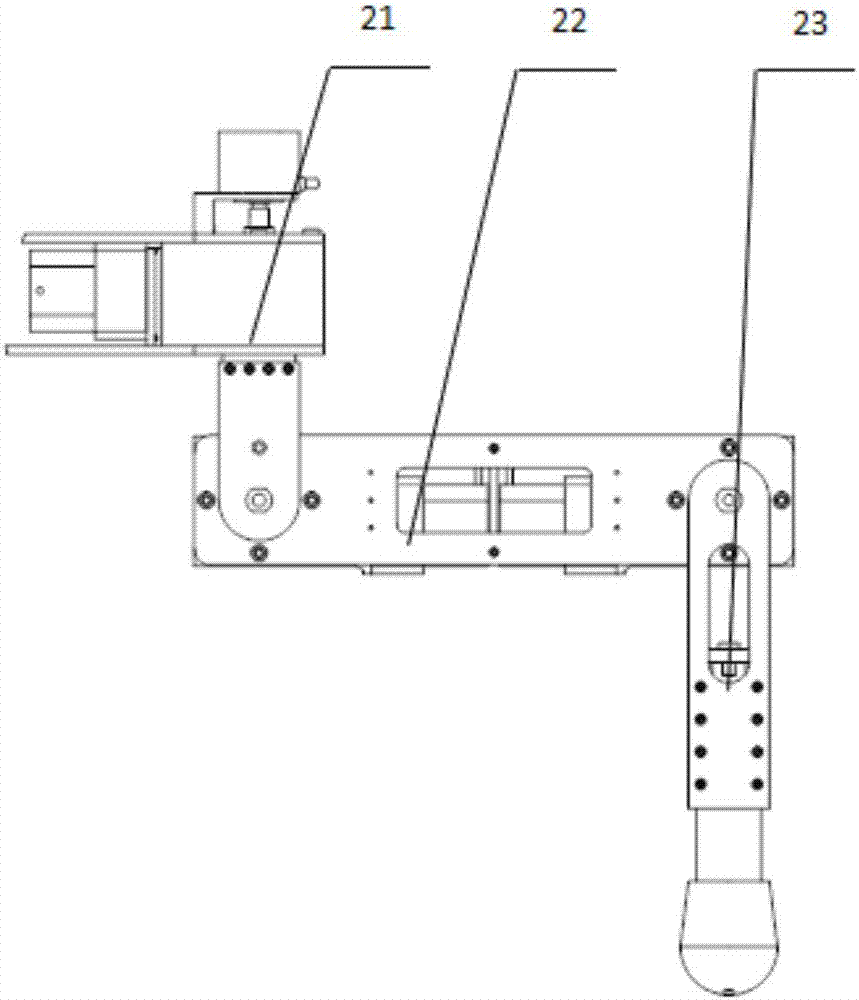
[0054] The mechanical foot 2 includes a base unit 21, a femoral unit 22 and a tibial unit 23, the base unit 21 and the tibial unit 23 are respectively fixed at the two ends of the femur unit 22, and the upper part of the base unit 21 is...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More