

Ship motion control simulation platform and ship motion control method
A ship motion and simulation platform technology, applied in general control systems, control/regulation systems, instruments, etc., can solve the problem that the reliability mathematical model has a great relationship with the accuracy of simulated sea conditions, the algorithm portability is not high, and the control algorithm is complex and other problems, to achieve the effect of clear program structure, strong portability and good convergence
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
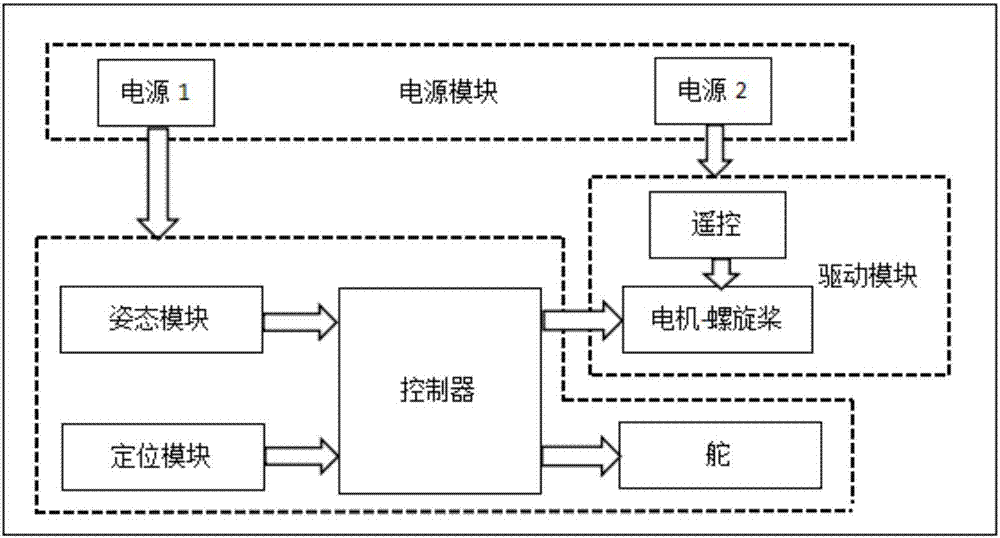
[0038] Such as figure 1 As shown, an embodiment of a ship motion control simulation platform is disclosed. The ship motion control simulation platform is a "motion platform", "platform" or "hull". The platform includes a power supply module, a drive module, an attitude measurement module, a position determination Module and control module, the power supply module provides power supply for each chip of the motion platform and the drive module; the drive module controls the forward movement and steering of the motion platform; the attitude measurement module and the position determination module measure the attitude and position data of the motion platform; the control module is based on the simulation The core of the platform obtains the attitude and position information of the motion platform, and then performs track tracking calculations to control the steering of the rudder blades to achieve the effect of motion control.
[0039]Below in conjunction with specific embodiment ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More