

Automatic marching robot system
A robot system and mobile robot technology, applied in the field of autonomous traveling robot system, can solve the problems of complex algorithm, high cost, complex running path, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
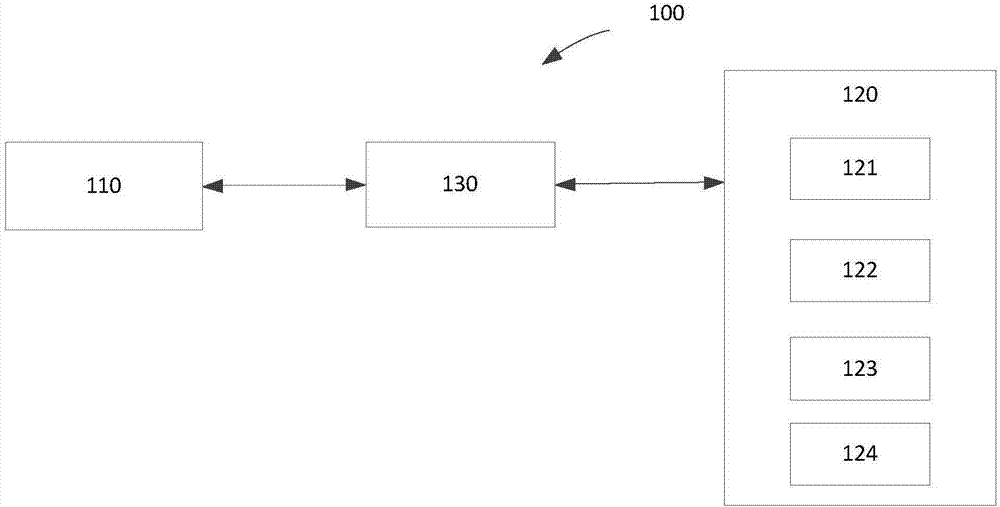
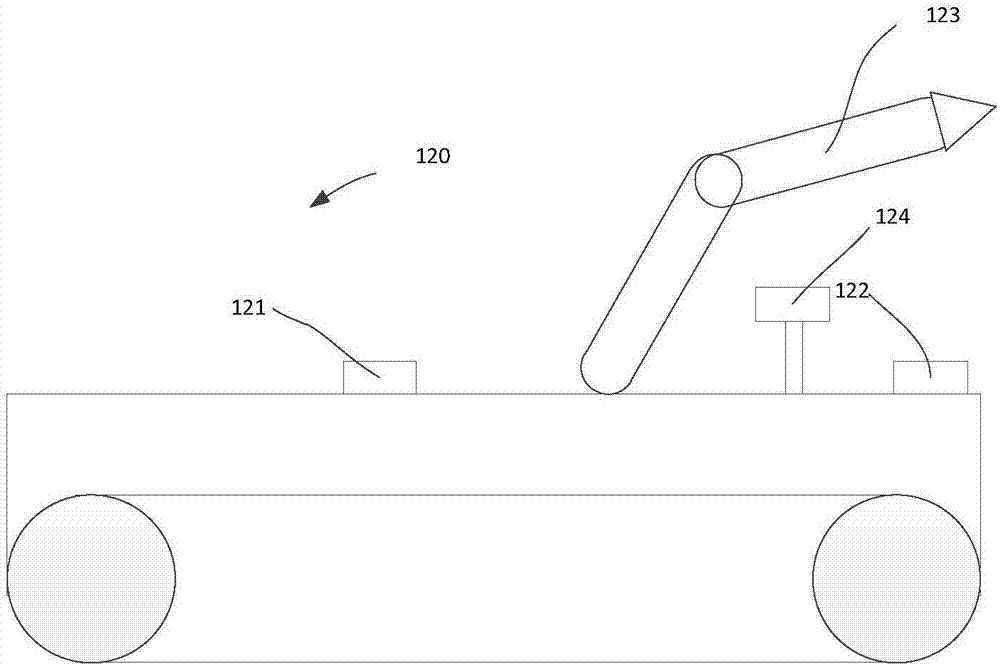
[0034] like figure 1 , figure 2 As shown, the present invention provides a self-propelled robot system 100, including a host computer 110, a mobile robot 120 equipped with a GPS module, and a communication device for transferring information between the host computer 110 and the mobile robot 120. Set 130; the host computer 110 is used to receive an autonomous patrol route, generate a discrete path sequence including latitude and longitude information according to the autonomous patrol route, and send the discrete path sequence to the mobile robot 120;
[0035] The mobile robot 120 uses the self-position collected by the GPS module 121 as the current position, and uses the discrete path sequence as the target position to travel point-to-point.
[0036] The process of the mobile robot 120 traveling from point to point is as follows:
[0037]After the mobile robot 120 acquires the latitude and longitude of the target position, utilize the laser ranging module 122 carried on th...
Embodiment 2
[0047] An embodiment of the present invention provides a self-propelled robot system, the robot body of which is as follows figure 2 As shown, the design idea is as follows:
[0048] (1) System communication design ideas
[0049] This multi-functional patrol auxiliary system consists of two parts, including crawler robot, host computer software and communication peripherals. The PC-side program realizes the wireless communication with the crawler robot through the communication peripherals, and its operation principle is as follows: image 3 shown.
[0050] (2) Design idea of crawler robot:
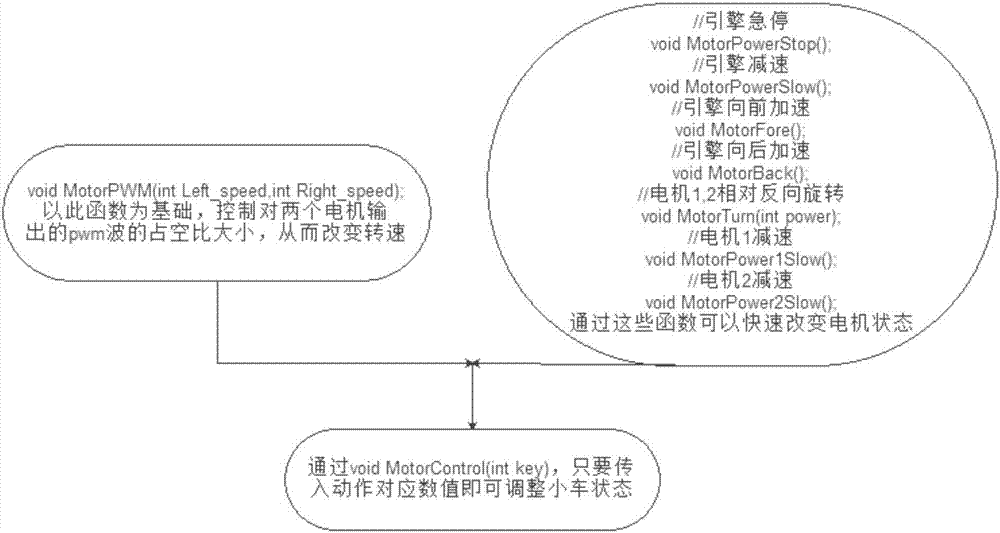
[0051] All-metal crawler vehicle body is adopted, and the main control chip is connected with other components in a star topology. Other components include motor drive components, wireless communication components, gyroscopes, GPS satellite positioning modules, camera acquisition and transmission components, and laser ranging modules. Steering gear control board and so on. Two ind...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More