

Optimal path planning method based on stroke depth
An optimal path planning and road link technology, applied in the field of navigation, can solve the problems of low efficiency of the breadth-first algorithm and the efficiency of the algorithm needs to be improved, so as to improve the planning efficiency, avoid the redundant calculation amount, and improve the path efficiency.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0034] The present invention will be described in further detail below in conjunction with the accompanying drawings and specific embodiments.
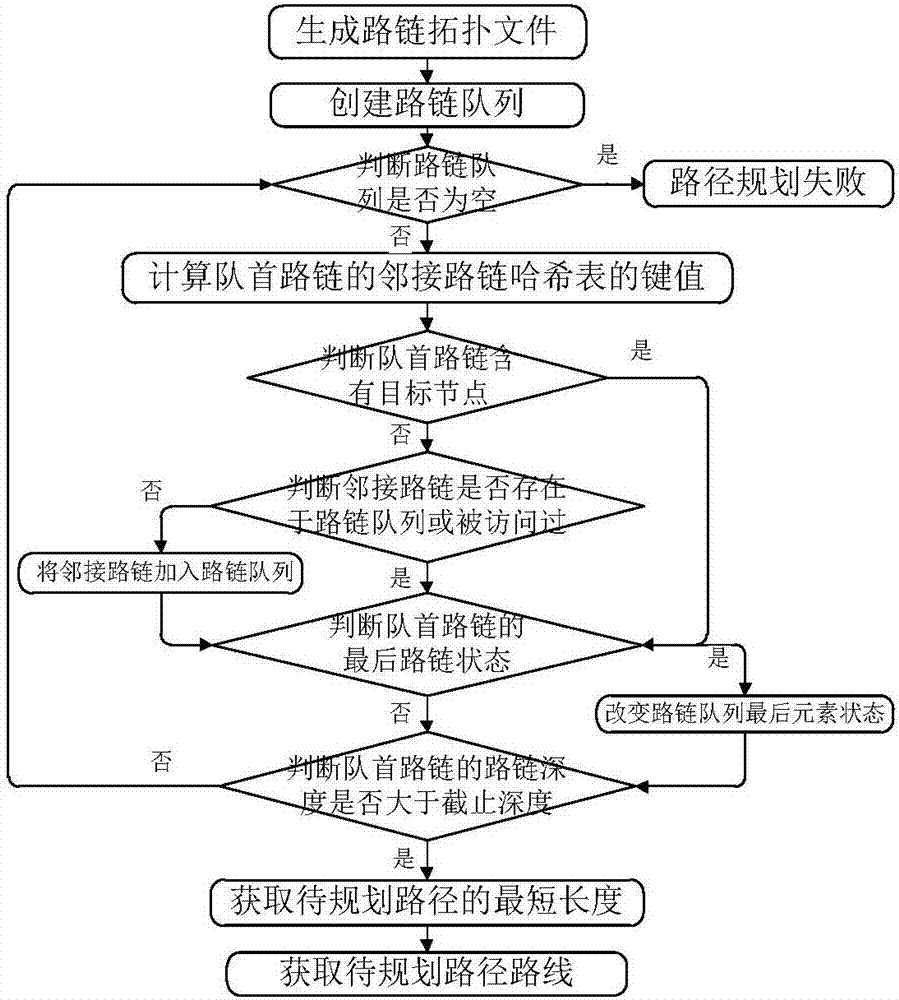
[0035] refer to figure 1 , an optimal path planning method based on link depth, including the following steps:
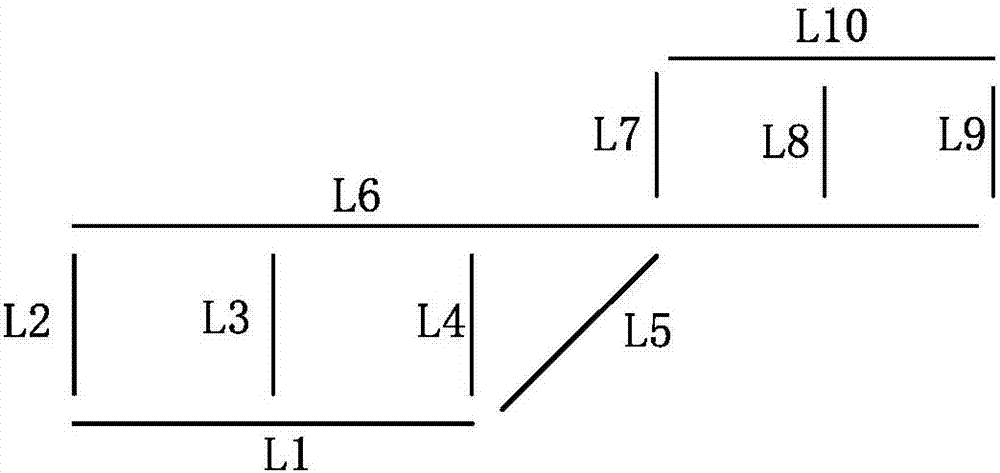
[0036] Step 1. Generate a node topology file according to the urban road network, and generate a link topology file according to the node topology file. The link data structure of the link topology file includes access judgment, predecessor pointer, link depth, hash table and the last Road chain;
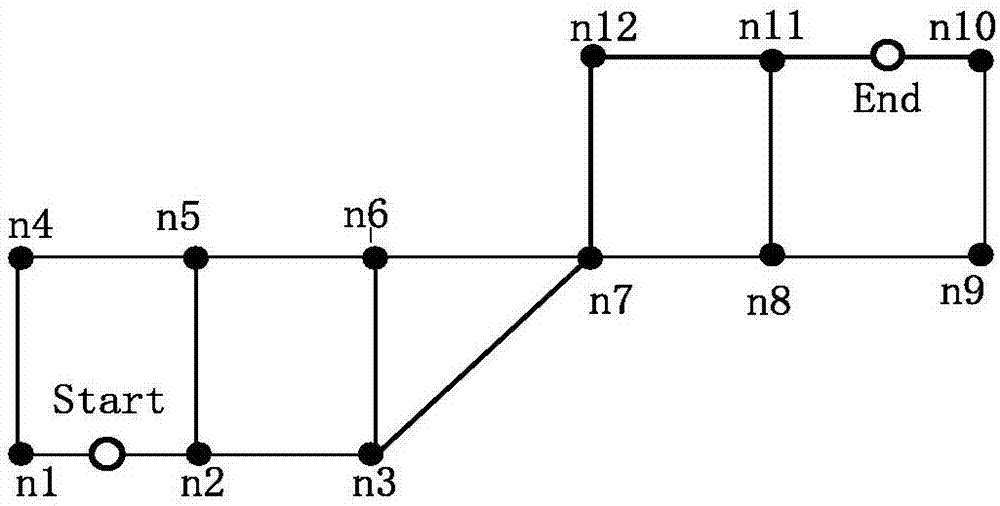
[0037] In this embodiment, the node topology file is generated according to the urban road network;
[0038] refer to figure 2 , the topological structure diagram of the urban road network in this embodiment, all the line segments represent the road, the length of the line segment represents the distance of the road, the points n1-n12 represent the nodes where the road needs to turn, and the points Start and End represent the r...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More