

A Method of Vehicle Motion State Estimation with Guaranteed Accuracy
A motion state and accuracy technology, applied in computing, image analysis, instruments, etc., can solve the problem of low accuracy of vehicle motion state
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0083] Below in conjunction with accompanying drawing, technical scheme of the present invention is described in further detail:
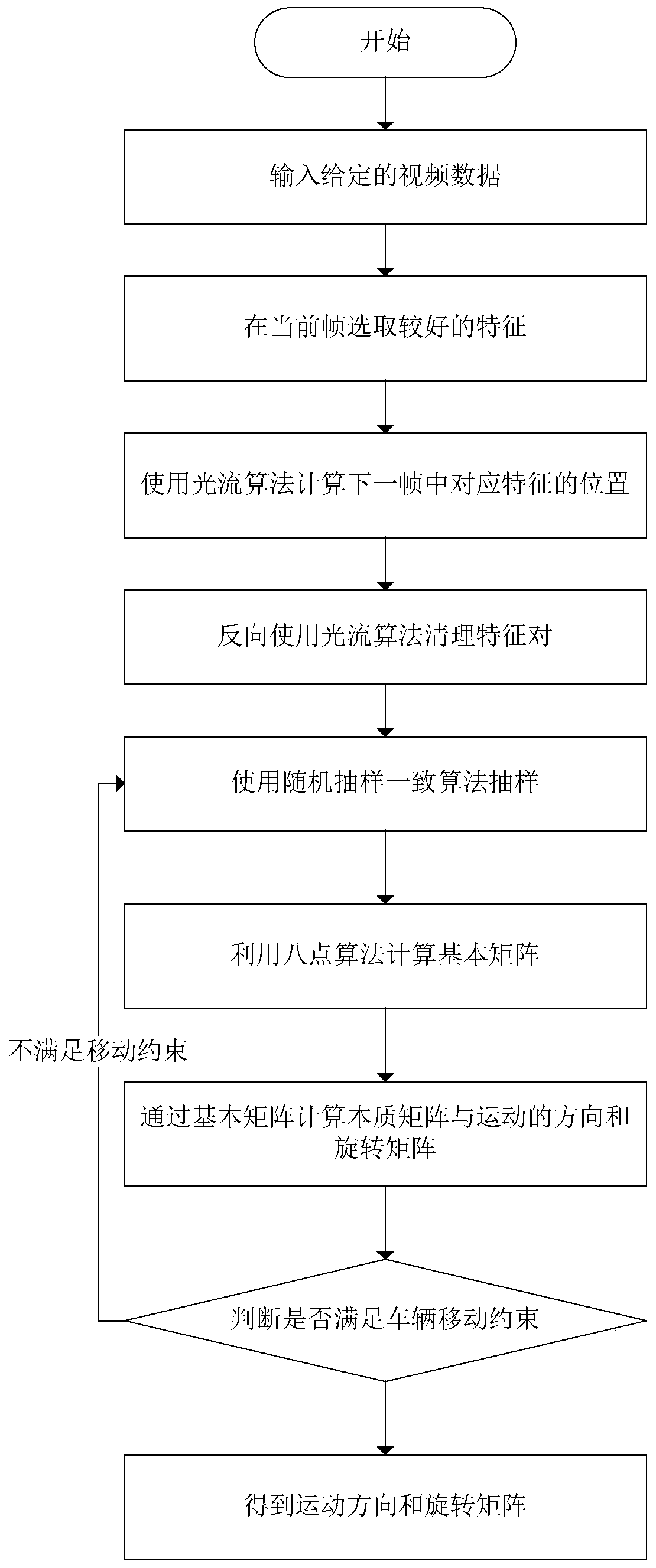
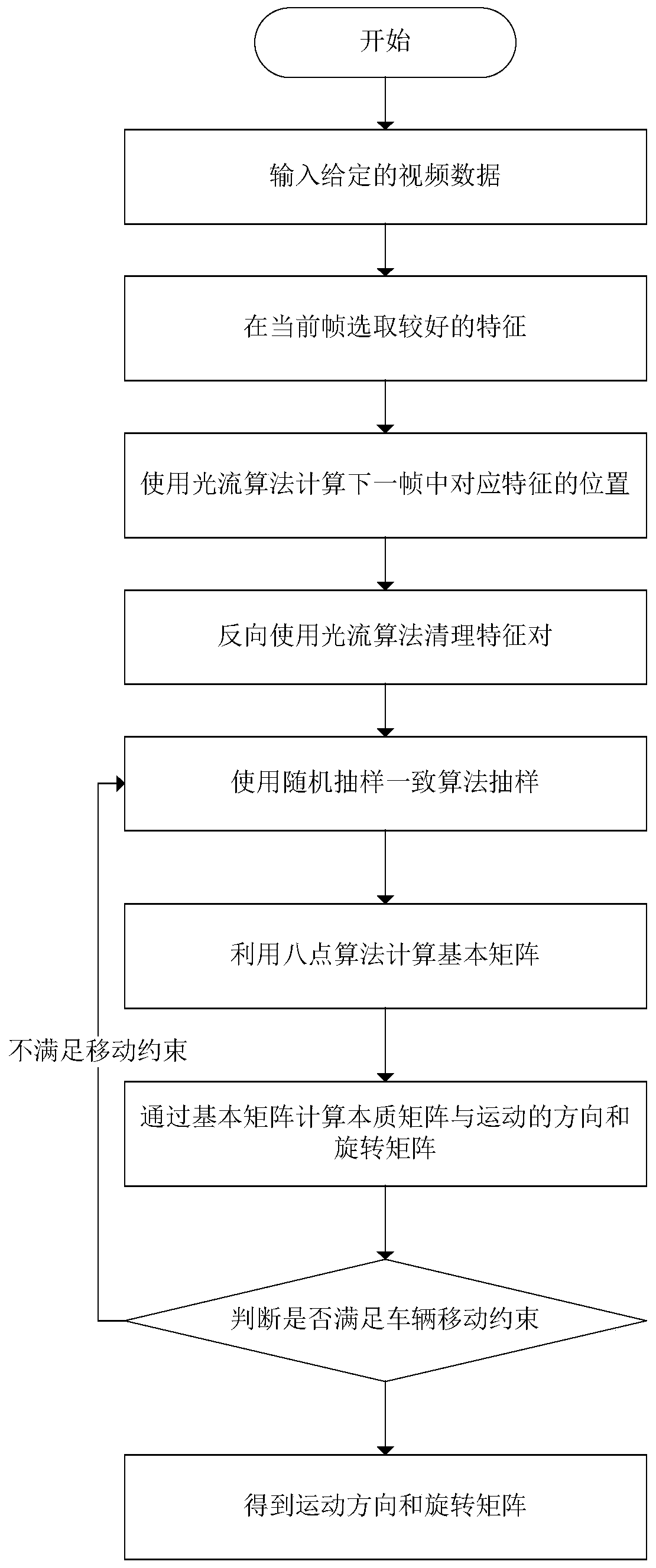
[0084] The present invention proposes a vehicle motion state estimation method that guarantees accuracy. It consists of three parts: feature extraction, data analysis, and result verification. Feature point pairs are extracted through a bidirectional optical flow algorithm, and a combination of random sampling consensus algorithm and eight-point algorithm is used to iterate. Solve the basic matrix to obtain the motion direction vector and rotation matrix, and verify the final result according to the vehicle's own motion path constraints. The feature extraction part of the algorithm uses a two-way optical flow algorithm to ensure the reliability of the obtained feature point pairs and filter noise data. The data analysis part adopts the combination of random sampling consensus algorithm and eight-point algorithm, sorts the obtained basic matrix acco...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More